Одним из важнейших способов отслеживания динамики хода экипажной части электропоезда «Сапсан» является метод контроля так называемого поперечного ускорения тележек вагонов электропоезда. Тележка — несущая образующая конструкция, объединяющая такие важнейшие составляющие, как колесные пары, буксовые узлы и компоненты привода электропоезда, которые максимально задействованны в процессе движения поезда и требуют особого контроля в пути следования для гарантированного обеспечения безопасности движения. В качестве датчиков контроля поперечного ускорения, возникающего в результате взаимодействия колесно-моторных блоков электропоезда, и вытекающего из этого процесса взаимодействия динамических реакций, направленных поперек оси пути, применяются механические акселерометры. Механический акселерометрический датчик установлен на каждой тележке электропоезда «Сапсан» (см. рис. 8.76 и 8.77).
Акселерометр (от лат. «accelero» — ускоряю и греческого «цетрео» — измеряю) — прибор для измерения ускорения (перегрузок), возникающего на движущихся объектах, в частности на конструкционных элементах высокоскоростного подвижного состава. В зависимости от вида движения акселерометры подразделяются на линейные и угловые, по принципу действия — на механические, электромеханические и др. Акселерометры измеряют ускорение как функцию времени или пути и измеряющий момент достижения объектом заданного значения ускорения или максимального значения ускорения в бы-стропротекающем процессе, например при ударе. Поперечное ускорение воспринимается механическим маятниковым устройством, в котором под действием ускорения возникают отклонения от положения равновесия. Механические акселерометры применяют при небольших (до 10 Гц) частотах колебаний конструкций или движущихся объектов.
На стабильность хода экипажной части электропоезда влияет большое количество динамических воздействий, вызванных контактным взаимодействием и геометрией поверхностей катания колесных пар и рельсового пути, а также реакции компонентов тележки. При эксплуатации стабильность хода механической экипажной части электропоезда может быть ограничена следующими техническими факторами влияния и отказами:
- неисправность или износ гидравлических амортизаторов виляния;
- чрезмерный износ или повреждения поверхности катания колесных пар;
- чрезмерный износ или повреждение элементов верхнего строения железнодорожного пути;
- повреждение или неисправность направляющих компонентов колесных пар (балансиры, буксовые направляющие, верхние части буксового подшипника).
Контроль стабильности хода реализуется в рамках рекомендаций и требований международного стандарта, установленного инструкцией UIC515-0:1994-01-01. Поперечное ускорение элементов рамы тележки не должно превышать определенного предельного значения, в частности для поездов серии «Velaro RUS» поперечное ускорение или предельно допустимые колебания составляют от 4 до 8 Гц. Соответственно, система контроля колебаний или вызванного этими механическими колебаниями поперечного ускорения имеет две ступени контролируемых уровней.
В основе работы датчиков поперечного ускорения фирмы «Knorr Bremze», используемых на тележках ЭВС «Сапсан», лежит формирование сигнала по принципу перемещения демпфирующего элемента, за счет инерционной массы которого при его колебаниях происходит замыкание двух контактных элементов. Эти элементы и формируют электрический аналоговый сигнал, отправляемый в анализирующее устройство. Принципиальная физическая модель простейшего механического акселерометра представлена на рис. 8.82.
Первая ступень имеет более низкое предельное значение ускорения в интервале величины частоты колебаний до 4,5 Гц, что соответствует ускорению более 5,5 м/с2 для тележки моторного вагона и 5,0 м/с2 для тележки прицепного вагона. Система при помощи датчика и анализирующего устройства отслеживает формируемые сигналы, которые после оцифровывания передаются в ЦБУ посредством многофункциональной шины MVB. ЦБУ реагирует и регистрирует предварительное критическое состояние только после получения серии, состоящей из семи последовательно сформированных сигналов от датчиков тележек, подвергшихся пороговым динамическим влияниям. Причиной возникновения вышеуказанных сигналов могут быть нестабильная работа элементов инфраструктуры (дефекты железнодорожного пути), неспособность конструктивных элементов экипажной части поезда гасить воздействующие динамические реакции, возникающие вследствие наличия каких-либо конструкционных дефектов, обусловленных износом рабочих элементов. Первая ступень работает аналогично системе контроля нагрева буксовых узлов: осуществляет автоматическую обработку полученных сигналов, производит их анализ и регистрацию с записью на флеш-память ЦБУ для информационной поддержки персонала ремонтной службы, т.е. при первой ступени уровня контроля поперечного ускорения тележки диагностические сообщения автоматически квитируются и записывается в подменю «ТО», не требуя обязательного вмешательства и ознакомления со стороны машиниста электропоезда «Сапсан». Архитектурная схема формирования сигналов поперечного ускорения тележки ЭВС «Сапсан» приведена на рис. 8.83.
Вторая ступень контроля уровня колебаний механической экипажной части ЭВС «Сапсан» вызывается реакцией ее поперечного ускорения, превышающей пороговое значение частоты колебаний 8 Гц, что соответствует ускорению более 8 м/с2 как для моторной, так и для прицепной тележек. Вторая ступень возникает, как и первая, после семи последовательных сигналов, сформированных посредством колебаний демпферного элемента датчика тележки. При этом согласно алгоритму контроля поперечного ускорения тележки, реализованному в программном обеспечении версии 5.3.0, с формированием диагностического сообщения посредством воздействия ЦБУ на контур ПКТ и БУТ-мастера на тормозную систему поезда активируется режим автоматического принудительного торможения в режиме «ПСТ» при фактической скорости движения электропоезда более 120 км/ч. При фактической скорости движения менее 120 км/ч сохраняется только действие диагностического сообщения без автоматического квитирования. Во избежание остановки поезда в пределах искусственных сооружений (тоннель, мост, токораздел и т.д.) системой управления и алгоритмом контроля поперечного ускорения предусмотрена возможность отмены начавшегося автоматического принудительного торможения в режиме «ПСТ» посредством импульсного толчка рукоятки задатчика тормозных усилий FS-41 в положение «ШСТ» на 1,5—2 с. Данная манипуляция возможна при фактической скорости движения электропоезда менее 120 км/ч.
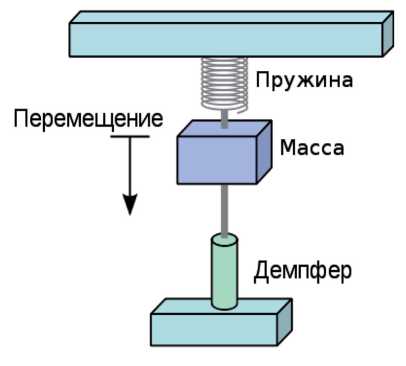
Рис. 8.82. Принципиальная физическая модель механического акселерометра
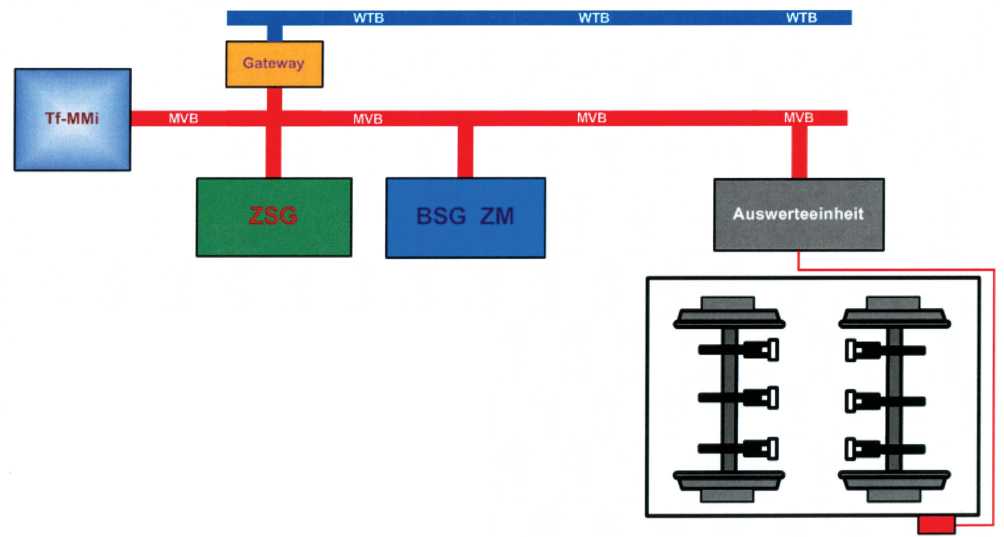
Рис. 8.83. Архитектурная схема формирования сигналов поперечного ускорения тележки ЭВС «Сапсан»: Tf-MMi — интерфейс «Человек—машина»; ZSG — центральный блок управления; BSG ZM — блок управления тормозной системой (менеджер); Auswerteeinheit — анализирующее устройство; Gateway — шлюз для связи многофункциональной и проводной шин
В случае отказа функции контроля поперечного ускорения, например при неисправности или повреждении датчика тележки, с момента формирования диагностического сообщения и появления его на ИЧМ кабины управления у машиниста есть 5 мин для снижения скорости до контролируемого предела 215 км/ч, в противном случае произойдет автоматическое принудительное торможение в режиме «ПСТ».