Микропроцессорная система управления и диагностики (МПСУиД) головного вагона электропоезда, через блок связи с пультом (БСП) получает информацию о положении органов управления тормозами в кабине управления, а через блок входных сигналов (БВС) – информацию о положении стоп-кранов, расположенных в салонах вагонов и команды на экстренное торможение от приборов безопасности. Полученная команда, по дублированной межвагонной линии связи рассылается во все вагоны электропоезда (сдвоенного электропоезда).
В каждом вагоне электропоезда (сдвоенного электропоезда), команды на пневматическое и электропневматическое торможение, полученные от МПСУиД, передаются в блок управления тормозной системой (электронный блок БТО 420).
При электродинамическом торможении, заданное рукояткой тормозное усилие передается в МПСУиД и далее по дублированной межвагонной линии связи Ethernet рассылается во все вагоны в виде задания в процентах от максимально возможной тормозной силы электрического торможения. В каждом моторном вагоне МПСУиД преобразовывает заданную тормозную силу в момент на валу ТЭД и передает его на выполнение в блок управления тяговым преобразователем (БУП ТП). БУП ТП непрерывно возвращает в МПСУиД величины мгновенного и максимально возможного момента на валах всех ТЭД.
Управление электрическим торможением одинаково в одиночном и сдвоенном электропоезде.
Состояние тормозов, включая положение разобщительных кранов, отображается на дисплее машиниста в экране состояния тормозов.
БЛОК – безопасный локомотивный обедненный комплекс; БТО – блок тормозного оборудования 420; БУП ТП – блок управления тяговым преобразователем; БУТ – блок управления тормозами (из состава БТО 420); ВЭТ – клапан срывной КС2 (из состава крана машиниста); ККМ – контроллер крана машиниста 345; КТТ – контроллер «Тяга-торможение»; КЭТ – клапан аварийного экстренного торможения (КАЭТ); МПСУиД – микропроцессорная систему управления и диагностики; ПЭТ – петля экстренного торможения; СПТ – кнопка управления стояночным тормозом; СТК – пассажирский стоп-кран; ТМ – тормозная магистраль; Ethernet – межвагонная линия связи.
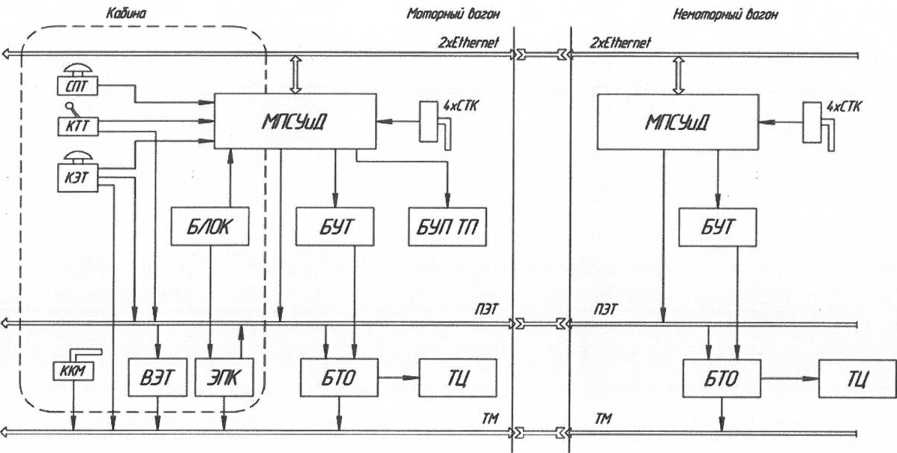
Рисунок 10.2 Структурная схема управления тормозной системой электропоезда
Система МПСУиД обеспечивает:
- вычисление и распределение тормозных усилий электрического и электропневматического тормоза между вагонами;
- передачу в БУТ задания для реализации тормозного усилия электропневматического торможения, в виде требуемой величины давления в цилиндрах тормозных блоков, из расчета максимальной загрузки вагона;
- плавность нарастания и спада тормозной силы электропоезда при служебном торможении посредством электродинамического и электропневматического торможения;
- индикацию на дисплее машиниста состояния тормозной системы электропоезда и отдельных вагонов, включая данные от системы диагностики БУТ и тягового преобразователя;
- запрет задания тягового усилия при неготовности тормозного оборудования.
Блок БУТ обеспечивает:
- реализацию заданной МПСУиД величины давления в цилиндрах тормозных блоков с учетом загрузки вагона;
- плавность нарастания тормозной силы поезда при служебном и экстренном торможении посредством автоматического пневматического тормоза и петли экстренного торможения;
- выдачу текущих значений давлений в цилиндрах тормозных блоков, пневморессорах (либо значение массы вагона), а также иные значения параметров;
- выдачу диагностической информации об отклонениях в работе устройств самого блока БУТ, а также блока БТО 420 и противоюзной защиты.
Связь между системами МПСУиД и БУТ осуществляется путем передачи данных по дублированной линии CAN. Для этого в системе МПСУиД устанавливается блок (шлюзовой модуль) БПЛ RS485-CAN.
Блок БПЛ RS485-CAN установлен в контейнере блока БТО 420 и представляет собой независимый, выполненный в виде отдельного устройства блок, состоящий из двух идентичных каналов. В случае выхода из строя одного канала, пропадании питания одного канала, обрыва, замыкания соответствующих ему линий связи, второй канал продолжает выполнять возложенную на него функцию.
Основной задачей БПЛ RS485-CAN является получение данных от блока БУТ, или передача данных к нему, первичная их обработка и пересылка в линию связи и обратно.