Контроллер «Тяга-торможение» предназначен для дистанционного управления, как режимами тяги, так и режимами электродинамического и электропневматического торможения. Переключение режимов тяги и торможения осуществляется путем перемещения рукоятки контроллера из фиксированного, «нулевого» положения, в положение «Тяга» (от себя) и «Торможение» (на себя). При отклонении рукоятки контроллера из положения «0», в какую либо сторону, на величину менее 9,5°, изменений в системе управления не произойдет, что обеспечивает защиту от случайного наклона рукоятки.
Рукоятка контроллера имеет следующие рабочие области (рисунок 10.1):
- «1» – используется для задания силы тяги;
- «2» – используется для управления торможением. В данной области, от точки Bmin до точки Вшах задается замедление электропоезда, которое в точке Вшах максимально возможное (полное служебное торможение). На основе замедления, выбранного машинистом, системой управления электропоезда ведется расчет силы торможения, соответствующей заданному замедлению и распределяется равномерно между всеми вагонами электропоезда. На каждом вагоне индивидуально задается сила торможения, исходя из его загрузки и ограничений по коэффициенту сцепления. На моторных вагонах приоритетной является сила электродинамического торможения, дотормаживание осуществляется применением электропневматических тормозов.
- «3» – область перехода от полного служебного торможения к точке экстренного торможения «ЕВ». В этой области происходит разрыв обеих петель экстренного торможение, получают питание вентиль тормозной безопасности (ВТБ) блока пневматического оборудования 420 и срывной клапан (КС2+ЭПВН2) блока исполнительного крана машиниста. При этом происходит разрядка тормозной магистрали темпом экстренного торможения и наполнение цилиндров тормозных блоков сжатым воздухом до максимального давления.
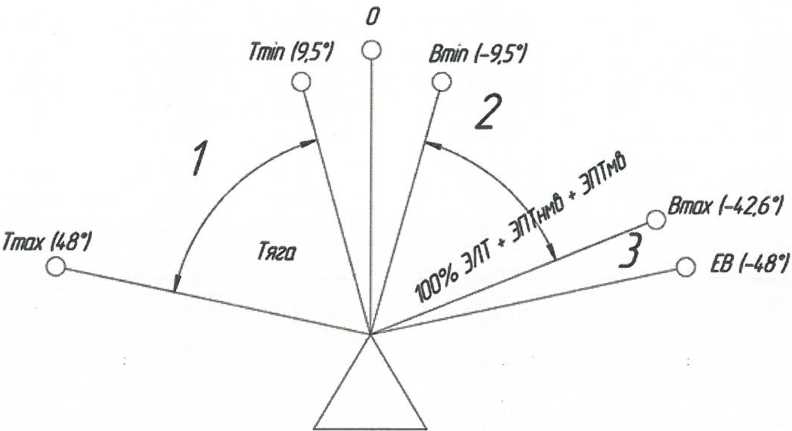
Рисунок 10.1 Рабочие области контроллера «Тяга-торможение»