КУРС-ТС (рис. 8.21) представляет собой функционально и конструктивно законченное устройство, рассчитанное на использование систем спутниковой навигации ГЛОНАСС/GPS, систем подвижной связи GSM/GPRS и вычислительной техники.

Рис. 8.21. Внешний вид КУРС-ТС
Навигационное коммуникационное устройство КУРС-ТС предназначено для применения на железных дорогах ОАО «РЖД» с целью информационного обеспечения систем диспетчерского контроля выполнения поездных и маневровых работ высокоскоростными электропоездами. КУРС-ТС осуществляет непрерывный дистанционный контроль местоположения поездных средств и параметров их движения, а также контроль параметров установленной на них аппаратуры железнодорожной автоматики.
КУРС-ТС включает:
- процессорный блок с модулем памяти, разработанный на базе встроенных микроконтроллеров с поддержкой интерфейсов RS-232, RS-485, CAN, Ethernet 10/100, Wi-Fi;
- встроенный приемник сигналов навигационных спутниковых систем в модульном исполнении, обеспечивающий комплексную цифровую обработку сигналов систем ГЛОНАСС и GPS с возможностью учета дифференциальных поправок от базовых станций;
- встроенный модуль инерциальной навигационной системы (ИНС) с трехосевым гироскопом и акселерометром;
- датчик давления (альтиметр);
- встроенный модульный модем GSM /GPRS;
- внешнюю одноблочную мультидиапазонную антенну ГЛОНАСС/GPS/GSM.
КУРС-ТС обеспечивает:
- определение координатно-временных параметров и параметров движения объекта, на котором он установлен, с использованием систем спутниковой навигации ГЛОНАСС/GPS;
- прием и передачу данных по радиоканалам связи стандартов GSM/GPRS, Wi-Fi с изменяемым периодом передачи;
- обмен информацией с внешними устройствами по стандартным интерфейсам обмена данными RS-232/RS-485/CAN/Ethernet (количество поддерживаемых интерфейсов обмена данными: RS-232 – 4; RS-485 – 2; CAN – 2; Ethernet 10/100 – 1);
- контроль параметров аппаратуры, установленной на объекте;
- формирование команд управления аппаратурой, установленной на объекте.
В состав устройства КУРС-ТС входят следующие функциональные модули:
- основной процессорный модуль на базе микропроцессорной сборки GE863-PRO3 c микропроцессором AT91SAM9260 и встроенным модемным модулем GSM/GPRS;
- вспомогательный интерфейсный модуль на базе микроконтроллера AT91SAM7A3;
- приемник навигационный ГЛОНАСС/GPS МНП-М3 (ЦВИЯ.468157.080);
- датчик инерциальный ADIS16364, содержащий трехосевой гироскоп и акселерометр;
- датчик давления (альтиметр) MS5549C;
- контроллеры интерфейсов последовательного обмена CAN/RS-232/RS-485;
- контроллер интерфейса Ethernet (IEEE 802.3/IEEE 802.3 и 10BASE-T/ 100Base-TX) на базе трансивера DM9161BIEP;
- контроллер WE865-dual интерфейса Wi-Fi (IEEE 802.11b/g);
- порт USB v2.0 Device (технологический);
- порт USB v2.0 Host для подключения внешней флеш-карты памяти;
- контроллер подключения внешней телефонной гарнитуры;
- панель индикаторная c семнадцатью светодиодами;
- внешняя флеш-карта памяти 4 Гб;
- слоты установки двух SIM-карт;
- источник электропитания модулей устройства, обеспечивающий преобразование входного напряжения 20—75 В постоянного тока в стабилизированное выходное напряжение 12 В.
Работа КУРС-ТС основана на использовании спутниковых навигационных систем ГЛОНАСС/GPS и каналов передачи данных сети подвижной связи общего пользования стандарта GSM/GPRS.
КУРС-ТС устанавливается в аппаратном шкафу вагона электропоезда или в кабине машиниста, подключается к бортовой сети электропитания. К антенным разъемам устройства подсоединяется внешняя антенна, размещенная на крыше поезда, обеспечивающая работу в диапазонах частот GSM/GPS/ГЛОНАСС, Wi-Fi.
После включения и инициализации КУРС-ТС автоматически устанавливает соединение с сервером сбора и обработки данных через радиоканал GSM/GPRS.
Устройство непрерывно обрабатывает радиосигналы спутниковых систем GPS/ГЛО-НАСС и определяет их достоверность, время, координаты дислокации, скорость и направление движения локомотива, электропоезда.
Для повышения точности определения дислокации электропоезда (поездного состава) дополнительно к данным, полученным от спутниковых систем GPS и ГЛОНАСС, процессорный модуль устройства использует информацию инерциального и альтимет-рического датчиков, а также векторных карт привязки географических координат к железнодорожным объектам в месте проведения поездных работ.
Под управлением операционной системы «Linux» и прикладного программного обеспечения КУРС-ТС, как уже было сказано, выполняет информационный обмен с бортовой аппаратурой через стандартные интерфейсы передачи данными RS-232/RS-485/ CAN/Ethernet. Тип и количество используемых интерфейсов, протоколы взаимодействия, алгоритмы обработки определяются выполняемой задачей в рамках реализуемого проекта. Реконфигурация устройства под новую область применения осуществляется путем модернизации прикладного программного обеспечения.
Формат сообщений, передаваемых устройством на сервер, обеспечивает временную синхронизацию информации, полученной от бортовой аппаратуры, с текущими значениями навигационных параметров. В случае если пропадает связь с сервером, данные сохраняются в энергонезависимой памяти и передаются на сервер при восстановлении соединения.
Функциональная схема КУРС-ТС представлена на рис. 8.22.
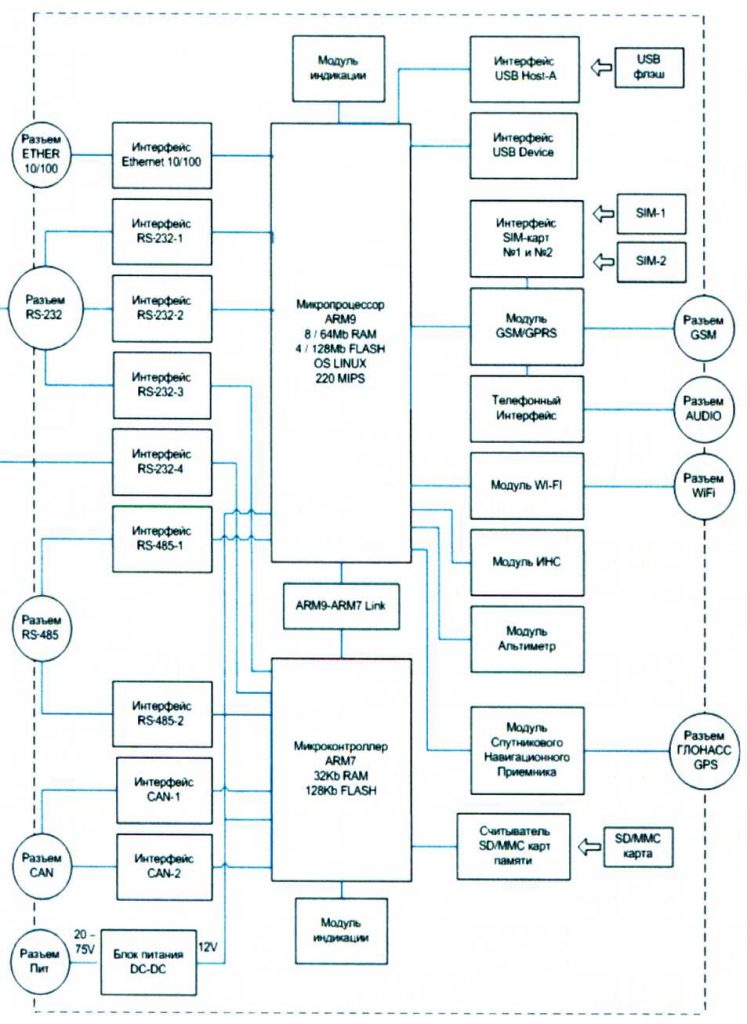
Рис. 8.22. Функциональная схема КУРС-ТС
КУРС-ТС поставляется в металлическом корпусе, состоящем из двух частей: основания и крышки.
Герметизация обеспечивается соединением типа «выступ—паз» на крышке и основании корпуса. Крышка крепится к с основанию шестью винтами M3.5 из нержавеющей стали с потайными головками и устанавливается на уплотнительную герметизирующую прокладку для обеспечения класса защиты от проникновения пыли и влаги до IP64.
На нижней части основания корпуса имеются две планки с четырьмя отверстиями 05.5 для крепления КУРС-ТС на стене или другой вертикальной поверхности.
На боковой стороне корпуса размещены: соединители — разъемы, посредством которых производится подключение устройства КУРС-ТС к источнику электропитания, интерфейсам контролируемой аппаратуры, внешней антенне, а также тумблер SA1, выполняющий функцию включения электропитания.
На крышке корпуса установлена индикаторная панель, где имеются 17 светодиодов, а также выгравированы их номера и условные обозначения, наименование устройства (КУРС-ТС), соединители боковой панели и их наименования.
Внешний вид индикаторной панели представлен на рис. 8.23.
Внутри корпуса установлены четыре печатные платы:
- плата преобразователя питания DC-DCv2;
- плата основного вычислителя NAVC-01;
- плата интерфейсная ARM7-01;
- плата приемника навигационного МНП3 GLO-M3.
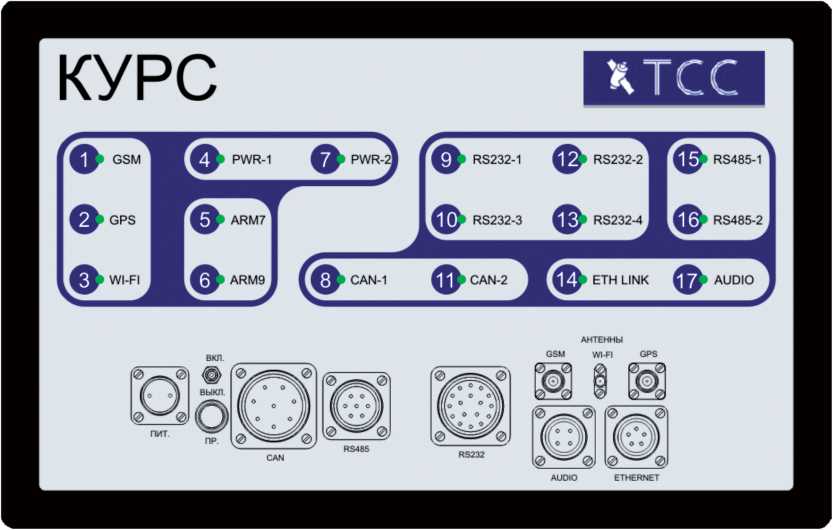
Рис. 8.23. Индикаторная панель
Платы DC-DC и NAVC закреплены к нижней поверхности основания корпуса при помощи шестигранных стоек М3х6, винтов M2.5×8 из нержавеющей стали, граверных шайб и гаек.
Плата GLO-M3 устанавливается на плату NAVC-01, крепление осуществляется при помощи шестигранных стоек М3х6, винтов M2.5×8 из нержавеющей стали, граверных шайб, гаек. Плата ARM7 установлена и закреплена над платой NAVC при помощи шестигранных стоек М3х20, винтов M2.5×8 из нержавеющей стали с граверными шайбами.
Информация о значениях индикаторов приведены в табл. 8.2.
| Номер индикатора | Обозначение индикатора | Состояние |
| 1 | GSM | Трехцветный индикатор состояния интерфейса GSM/GPRS:
|
| 2 | GPS | Трехцветный индикатор состояния интерфейса ГЛОНАСС/GPS:
|
| 3 | Wi-Fi | Трехцветный индикатор состояния интерфейса Wi-Fi:
|
| 4 | PWR-1 | Одноцветный индикатор наличия электропитания:
|
| ARM7 | Одноцветный индикатор состояния модуля ARM7:
|
|
| 6 | ARM9 | Одноцветный индикатор состояния модуля ARM9:
|
| 7 | PWR-2 | Одноцветный индикатор наличия электропитания:
|
| 8 | CAN-1 | Одноцветный индикатор состояния интерфейса CAN-1:
|
| 9 | RS-232-1 | Одноцветный индикатор:
|
| 10 | RS-232-3 | Одноцветный индикатор состояния интерфейса RS-232-3:
|
| 11 | CAN-2 | Одноцветный индикатор состояния интерфейса CAN-2:
|
| 12 | RS-232-2 | Одноцветный индикатор состояния интерфейса RS-232-2:
|
| 13 | RS-232-4 | Одноцветный индикатор состояния интерфейса RS-232-4:
|
| 14 | ETH LINK | Одноцветный индикатор состояния интерфейса ETHERNET:
|
| 15 | RS-485-1 | Одноцветный индикатор состояния интерфейса RS-485-1:
|
| 16 | RS-485-2 | Одноцветный индикатор состояния интерфейса RS-485-2:
|
Определение динамических и координатно-временных параметров движущегося локомотива путем обработки показаний инерциальных датчиков, синхронизированных на основе спутниковой навигации
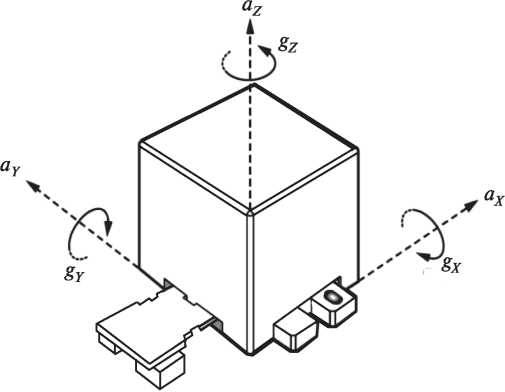
Рис. 8.24. Инерциальный шестиканальный датчик
Инерциальный измерительный (рис. 8.24) блок представляет собой функционально законченный блок инерциальных датчиков, предназначенный для формирования цифровых кодов кажущегося линейного ускорения и абсолютной угловой скорости, действующих по осям блока, с последующей их выдачей по последовательному коду в линии связи внешним потребителям.
Инерциальная система измеряет три линейных и три вращательных ускорения по осям X, Y, Z с частотой 50 Гц. Эта информация используется как для повышения точности и качества работы спутниковой навигационной системы (рис. 8.25), так и для одновременного вычисления динамических характеристик локомотива (вертикальные и боковые ускорения, раскачка кузова, комфортность). Эти данные совместно с информацией КЛУБ-У передаются по каналам связи в базу данных для оперативной обработки и выявления аномалий поведения локомотива в системе «рельс—колесо—кузов» (рис. 8.26, 8.27).
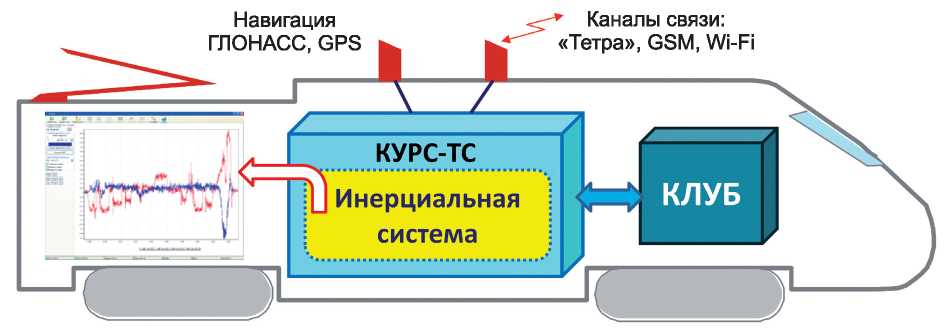
Рис. 8.25. Схема взаимодействия устройств регистрации
Диаграмма, характеризующая тип и степень динамического отклонения локомотива путем сравнения полученного отклонения с нормой
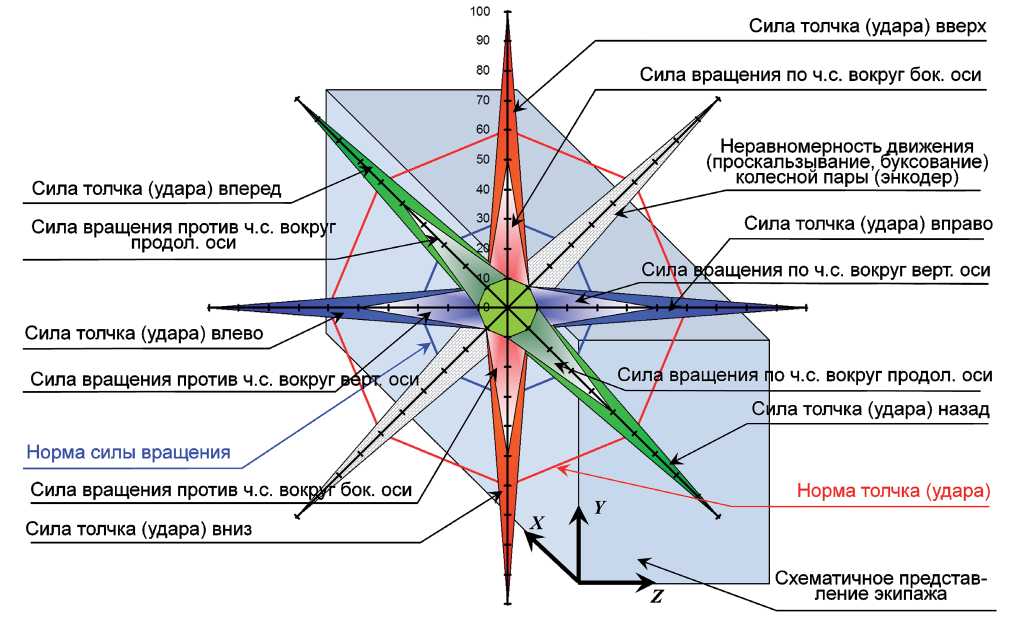
Рис. 8.26. Форма представления динамических отклонений локомотива путем обработки показаний инерциальных датчиков
Проезд стрелки на скорости 90—100 км/ч
Обработка данных инерциального датчика выявила наличие:
- Сильных боковых перегрузок как вправо, так и влево.
- Средних ускорений вокруг продольной и вертикальной осей.
- Остальных параметров в пределах нормы.
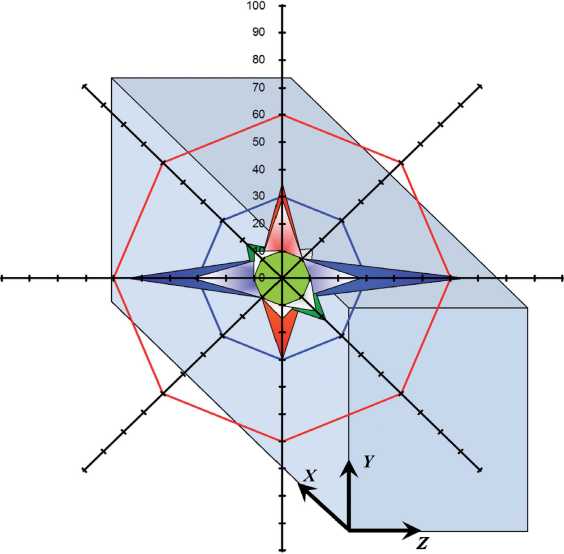
Рис. 8.27. Диаграмма, характеризующая динамические отклонения локомотива путем обработки показаний инерциалльных датчиков (а) и схема автоматической передачи сведений о «толчке в пути» (б)
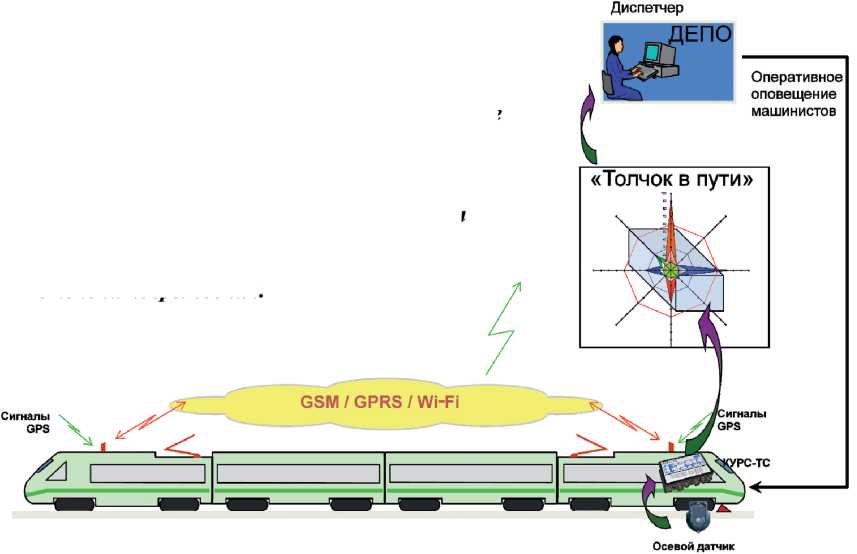
Реализация данной схемы оповещения о «толчке в пути» позволит:
- Оперативно получить информацию о «толчке в пути» с точной привязкой как к географическим координатам, так и к линейным.
- Исключить человеческий фактор из схемы оповещения.
- Иметь косвенную информацию о типе и степени повреждения.