5.1 Общие сведения
Электропоезд оборудован тяговыми асинхронными электроприводами, которые обеспечивают на каждой моторной колесной паре равномерное регулирование силы тяги и торможения, а также частоты вращения при юзе и боксовании. В каждом моторном вагоне четыре трехфазных асинхронных тяговых двигателя, получают попарно высоковольтное питание от инверторов, которые объединены в одном тяговом преобразователе.
Контроллер тяга/торможение выполняет функцию дистанционного управления режима тяги или торможения электропоезда.
Блок управления приводом (БУП) осуществляет регулирование, управление и диагностику неисправностей тягового оборудования, согласно значениям тягового и тормозного усилия, задаваемые машинистом электропоезда или системой автоведения. БУП обеспечивает постоянную связь с центральным блоком управления (ЦБУ).
Блок БУП (ASG) обрабатывает следующие основные функции:
- подготовка команд;
- задание и обработка граничных значений;
- функции электрической защиты от юза и боксования;
- регулирование заданного тягового усилия и усилия электрического торможения;
- управление тяговым преобразователем;
- контроль параметров сети;
- контроль защиты узлов тягового привода;
- тестирование оборудования привода;
- предоставление диагностических сообщений, касающихся тяги.
Системы управления и безопасности обеспечивают работоспособное состояние электропоезда во всех режимах работы, а также исключают создание опасных (аварийных) ситуаций, возникающих в результате некорректных и неправильных действий со стороны локомотивной бригады (обслуживающего персонала).
5.2 Управление контроллером тяга/торможение
5.2.1 Общие сведения
Контроллер тяга/торможение предназначен для задания тягового или тормозного усилия, путем перемещения ручки контроллера в одно из трех положений: «0», «Тяга» и «Торможение».
Положение «0» – команды на тормозное и тяговое усилия отсутствуют.
Положения «Тяга» и «Торможение» разделены на рабочие области и имеют диапазон отклонения от положения «0» в пределах 42 °.
Внешний вид контроллера тяга/торможение представлен на рисунке 5.1.
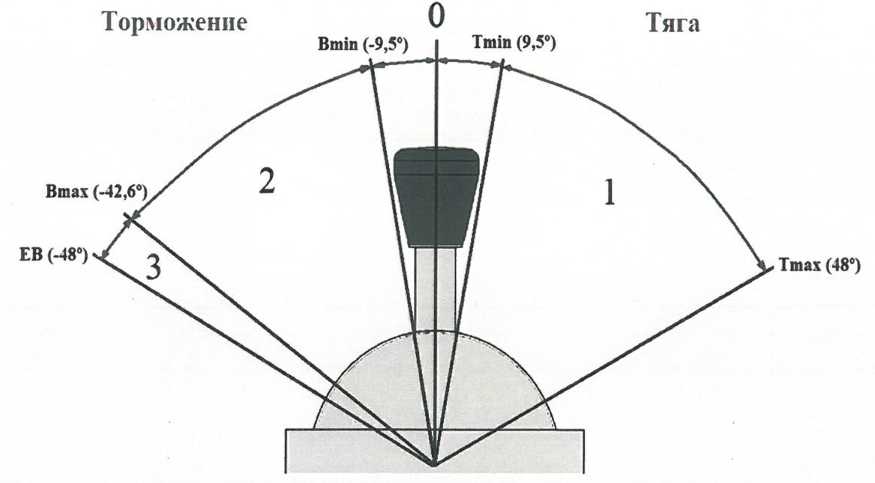
Рисунок 5.1 – Контроллер тяга/торможение
5.2.2 Управление в режиме «Тяга»
При отклонении ручки контроллера в положении «Тяга» в диапазоне от «0» до «Tmin (9,5°)» (рисунок 5.1), электропоезд приводится в состояние готовности к движению, при этом сила тяги отсутствует.
При постановке ручки контроллера в рабочую область «1», от положения «Tmin (9,5°)» до положения «Тmax (48°)», обеспечивается задание силы тяги, которая будет возрастать в зависимости от угла наклона ручки.
Задание силы «Тяги» с контроллера, осуществляется при выполнении следующих условий:
- наличие сигнала БВ включен;
- наличие сигнала о разблокировании не менее одного тягового преобразователя;
- задано направление движения «Вперед» или «Назад»;
- наружные автоматические двери закрыты и заблокированы (отсутствует сигнал о неисправности);
- наличие режима питания электропоезда «Полная мощность» или «Ограниченная мощность»;
- произведен отпуск стояночного тормоза;
- давление в питательной магистрали более 0,6 МПа;
- давление в ТМ не ниже 0,45 МПа;
- отсутствует неисправность любой пневморессоры электропоезда при скорости более 100 км/ч;
- отсутствуют сигналы «Аварийное торможение» и «Экстренное торможение»;
- разобщительные краны находятся в положениях соответствующее штатному режиму работы электропоезда;
- отсутствует сигнал от комплекса БЛОК на запрет тяги.
5.2.3 Управление в режиме «Торможение»
5.2.3.1 Общие сведения
Управление и контроль торможением осуществляет блок управления торможением (БУТ). БУТ при нормальном режиме эксплуатации, при помощи входных значений, определяет загрузку электропоезда, производит диагностику запроса на торможение и готовность тормозных систем, определяет тормозные усилия для служебного торможения и распределяет их по тормозным системам каждого вагона.
Информация о тормозном усилии отображается на индикаторе основного экрана терминала УиД, электрическое торможение зеленным цветом, пневматическое торможение желтым цветом.
При управлении торможением, для максимального использования электрического торможения и минимального износа тормозных накладок, машинист должен отклонять контроллер в сторону торможения настолько, чтобы на индикаторе основного экрана терминала УиД зеленая область была максимально видна, а желтая минимально или полностью отсутствовала.
В случае отказа электрического торможения, автоматически происходит его замещение электропневматическим тормозом.
5.2.3.2 Основной режим торможения
Основной режим торможения осуществляется с помощью контроллера тяга/торможение, при этом запрос на тормозное усилие происходит постепенно. Котроллер «Тяга/Торможение» имеет следующие рабочие области в режиме «Торможение» (рисунок 5.1):
1. Рабочая область от «0» до «Bmin (- 9,5°)» – готовность к торможению.
При постановке ручки контроллера равной углу наклона от 0 ° до – 9,5°, электропоезд приводится в состояние готовности к торможению.
2. Рабочая область «2» – совместное действие электрического и электропневматического (ЭПТ) тормозов.
При постановке ручки контроллера от положения «Bmin (- 9,5°)» до положения «Вшах (- 42,6°)» (область «2»), происходит электрическое торможение на моторных вагонах (1, 5) и электропневматическое торможение на немоторных вагонах (2, 3, 4). При этом сила торможения увеличивается в зависимости от угла наклона ручки контроллера и распределяется равномерно между всеми вагонами.
При снижении скорости до 15 км/ч на моторных вагонах происходит замещение электрического торможения на электропневматическое.
При постановке ручки контроллера в фиксированное положение «Вmax (- 42,6°)» создается полное служебное торможение.
3. Рабочая область «3» – переход от полного служебного торможения в экстренное торможение.
При постановке ручки контроллера из положения «Вmax (- 42,6°)» в положение «ЕВ (- 48°)» происходит экстренное торможение.
5.3 Управление краном машиниста КМ345
Кран машиниста КМ345 предназначен для управления сжатым воздухом в тормозной магистрали электропоезда и имеет четыре положения в соответствии с рисунком 5.2.
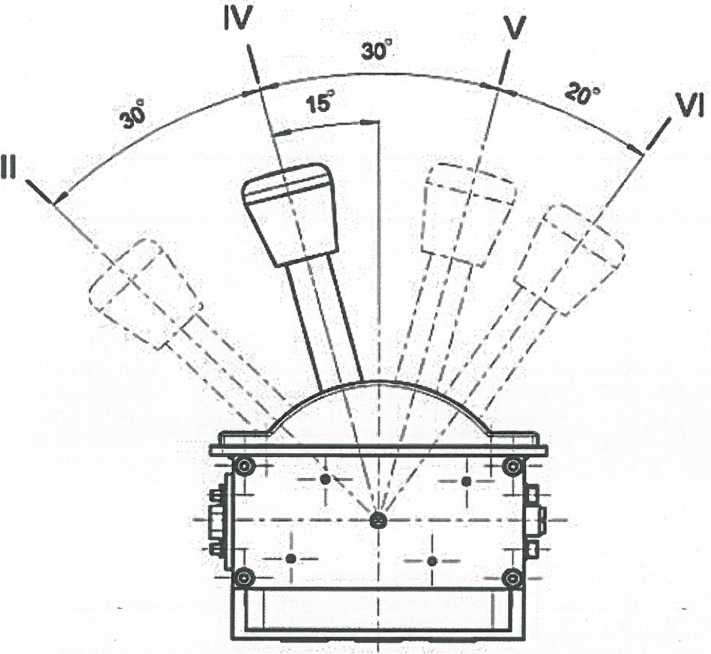
Рисунок 5.2 – Кран машиниста КМ345
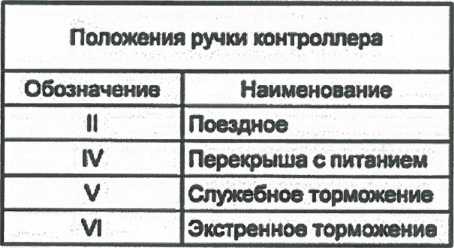
Положения крана машиниста КМ345:
- ) Поездное «II»
Предназначено для автоматического поддержания зарядного давления в тормозной магистрали и отпуска тормозов. При движении в режиме «Тяга» ручка крана машиниста КМ345 всегда должна находиться во «II» поездном положении, в этом случае тормоза отпущены и готовы к действию. - ) Перекрыша с питанием «IV»
Предназначено для поддержания, установившегося в тормозной магистрали давления. В случае выполнения ступени торможения краном машиниста КМ345 посредством постановки ручки в положение «V» и последующей постановкой ручки крана машиниста в положение «IV» перекрыша с питанием, происходит прекращение выпуска воздуха из тормозной магистрали и обеспечивается поддержание заданного давления в тормозных цилиндрах на момент ступени торможения. - ) Служебное торможение «V»
Предназначено для приведения пневматических тормозов всего состава электропоезда в действие, снижением давления в УР на определенную величину. - ) Экстренное торможение «VI»
Предназначено для экстренной остановки электропоезда, быстрой разрядкой ТМ После применения экстренного торможения ручка крана остается в положении «VI» до полной остановки электропоезда.
5.4 Управление стояночным и удерживающим тормозами
5.4.1 Стояночный пружинный тормоз
Стояночный пружинный тормоз (СПТ) может работать в ручном или автоматическом режимах.
Управление работой СПТ в ручном режиме, осуществляется с пульта машиниста при помощи кнопочных выключателей «Включить СПТ» и «Отпустить СПТ».
Включение СПТ в ручном режиме происходит при выполнении следующих условий:
- скорость меньше или равна 2 км/ч;
- нажата кнопка «Включить СПТ»;
- отсутствует сигнал от кнопки «Отпустить СПТ».
Отпуск СПТ в ручном режиме происходит в следующем порядке:
- при нажатии кнопки «Отпустить СПТ» и отсутствии сигнала от кнопки «Включить СПТ» – происходит отпуск стояночного пружинного тормоза и включение удерживающего;
- при удержании кнопки «Отпустить СПТ» в течение 10 с, происходит отпуск стояночного пружинного тормоза и отпуск удерживающего тормоза.
В автоматическом режиме СПТ включается самопроизвольно при включении или отключении «ВУ», самопроизвольный отпуск СПТ в данном режиме не предусмотрен.
СПТ считается неисправным локально на вагоне, если выполняется любое из следующих условий:
- наличие сигнала от БТО «СПТ не сработал, БУ СТ неисправен»;
- наличие сигнала от БТО «Вентиль «Вкл. БУСТ» не работает, БУСТ неисправен»;
- наличие сигнала от БТО «Вентиль «Выкл. БУСТ» не работает, БУСТ неисправен»;
- наличие сигнала от БТО «Отсутствие информации от датчика ДД11, БУСТ неисправен»;
- при снятой команде на включение стояночного тормоза давление БУСТ менее 200 кПа в течение времени более 10 с.
5.4.2 Удерживающий тормоз
Удерживающий тормоз приводится в действие при выполнении следующих условий:
- скорость движения электропоезда уменьшилась до 0,5 км/ч и не возрастает в течении 1 с;
- не задана сила тяги.
При включении удерживающего тормоза, приводится в действие ЭПТ только на головных вагонах 1 (5), с давлением в тормозных цилиндрах равным 0,15 МПа.
Отпуск удерживающего тормоза происходит при выполнении любого из следующих условий:
- установлен режим «Тяга» с продолжительностью времени более 1 с;
- включен СПТ.
5.5 Режим очистки тормозных дисков
Режим очистки тормозных дисков предназначен для очистки тормозных дисков от загрязнений, льда и снега.
Включается режим очистки тормозных дисков кратковременным нажатием кнопки «Очистка тормозных дисков», при выполнении следующих условий:
- контроллер тяга/торможение в положении «Тяга», или в рабочей области «2» положения «Торможение»;
- скорость электропоезда более 5 км/ч.
Отключение режима очистки тормозных дисков происходит при выполнении следующих условий:
- повторное кратковременное нажатие кнопки «Очистка тормозных дисков»;
- по истечении 5 минут, после включения режима очистки тормозных дисков;
- скорость электропоезда менее 5 км/ч;
- контроллер тяга/торможение переведен из положения «Тяга» или из рабочей области «2» положения «Торможение».
После отключения режима очистки тормозных дисков, допускается возможность его повторного включения.
ВНИМАНИЕ: РЕЖИМ ОЧИСТКИ ТОРМОЗНЫХ ДИСКОВ НЕОБХОДИМО ИСПОЛЬЗОВАТЬ ТОЛЬКО ПРИ НЕБЛАГОПРИЯТНЫХ УСЛОВИЯХ, СНИЖАЮЩИЕ КОЭФФИЦИЕНТ СЦЕПЛЕНИЯ КОЛЕС С РЕЛЬСОМ!
5.6 Функция защиты от юза колесных пар
Для исключения юза колесных пар, на электропоезде применяется функция защиты от юза, которая препятствует скольжению колесных пар и обеспечивает оптимальное использование коэффициента сцепления.
На всех колесных парах с помощью импульсных датчиков и датчиков скорости, бесконтактно регистрируются счетные импульсы. По количеству импульсов за единицу времени электронный блок защиты от юза определяет скорость вращения оси и относительную скорость электропоезда. Электронный блок защиты от юза является составной часть блока управления торможением (БУТ).
Если начинается блокировка колесной пары, т.е. скорость падает, а замедление колеса растет. В зависимости от высоты порогового значения электронный блок защиты от юза посылает электрический сигнал клапанам защиты от юза для стабилизации или снижения давления. В результате обеспечивается оптимальный коэффициент сцепления колесных пар.
При служебном торможении, функция защиты от юза системы управления приводом, осуществляет регулирование до малых коэффициентов скольжения и сокращает электродинамическое тормозное усилие уже при незначительных замедлениях колесных пар. Благодаря такой настройке противоюзной системы, блок управления приводом в штатном режиме принимает на себя управление электродинамическим тормозом. Если на моторных колесных парах возникает сильное скольжение, пневматический тормоз модулируется при помощи пневматической защиты от юза, и выдаются понижающие сигналы в систему управления приводом с целью сокращения электродинамического тормозного усилия.
Для уменьшения тормозного пути, при экстренном торможении, защита от юза регулирует тормозное усилие таким образом, чтобы оптимально использовалось сцепление между колесом и рельсом. Благодаря этому на моторных осях действуют более высокие коэффициенты скольжения, чем при служебном торможении. Параметры регулирования пневматической защиты от юза в БУТ, настроены на использование оптимального коэффициента сцепления. По этой причине при экстренном торможении пневматическая защита от юза принимает на себя только регулирование тормозными системами.
В случае аварийного торможения пневматическая защита от юза БУТ по аналогии с экстренным торможением принимает на себя только регулирование тормозными системами. Блок управления приводом контролирует регулирование электродинамического тормозного усилия до соблюдения заданных предельных значений.
В случае нарушения поездной линии связи между блоком управления приводом и блоком управления торможением каждая из двух противогазных систем начинает работать автономно.
5.7 Управление электропоездом в режиме «Автоведение»
5.7.1 Общие сведения
Система автоведения (АВ) управляет тяговым и тормозным усилием электропоезда и выполняет следующие функции:
- расчет и автоматическое ведение электропоезда согласно определенной траектории движения. Точность по скорости движения составляет: 1 км/ч при скоростях до 60 км/ч и 2 км/ч при скоростях свыше 60 км/ч.;
- обеспечивает учет и обработку кодов АЛСН;
- соблюдение графика движения с точностью ±15 секунд;
- энергосберегающий режим движения (данный режим соблюдается при наличии резервного времени в графике движения, если резерв времени в графике движения отсутствует, энергосберегающий режим не соблюдается).
Система автоведения работает в двух режимах:
- режим работы «Автоматический». Система автоведения принимает на себя задачу поддержания заданной скорости и управления тормозами. Машинист электропоезда в данном режиме осуществляет только контроль над системой. В случае необходимости применения торможения машинист электропоезда переводит ручку контроллера тяга/торможение в положение тормоз;
- режим работы «Информационный». Система автоведения работает в информационном режиме. Машинист получает рекомендации по управлению электропоездом и вручную выбирает необходимое для движения тяговое и тормозное усилие.
Система автоведения получает от комплекса БЛОК следующие данные:
- координаты пути;
- максимально допустимую скорость движения электропоезда на данном участке пути;
- заданную скорость системы автоведения;
- фактическую скорость;
- корректировку графика движения.
На индикаторе БИЛ-М комплекса БЛОК отображается следующая информация:
- режим системы автоведения;
- заданная скорость системы автоведения.
Экран «Система автоведения» («СИМ») представлен на рисунке 5.3.
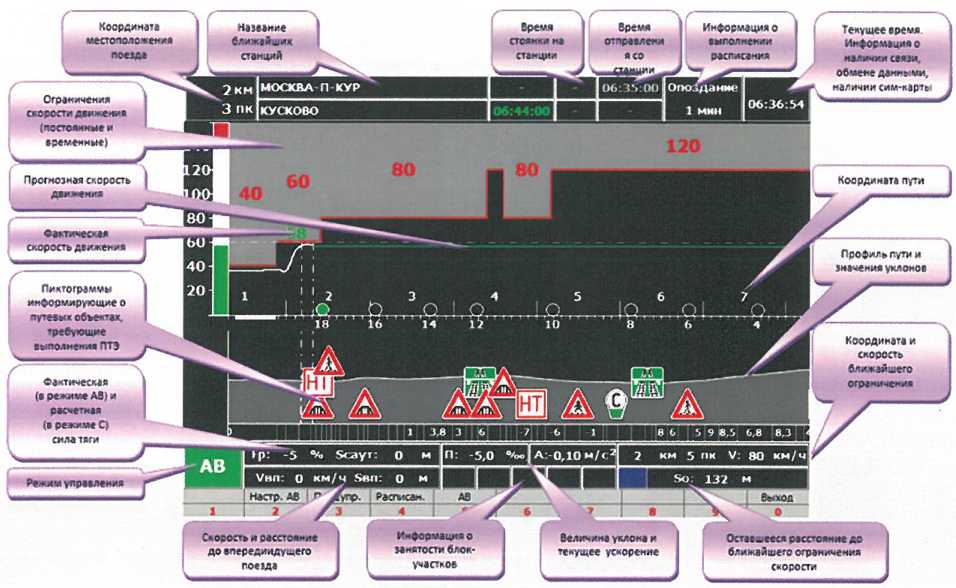
Рисунок 5.3 – Экран «Система автоведения» («СИМ»)
5.7.2 Подготовка «Системы автоведения» к работе
После включения питания МПСУиД и БЛОК, для настройки АВ необходимо из «Основного экрана» (рисунок 5.4) по кнопке «9» перейти в экран СИМ (рисунок 5.5).
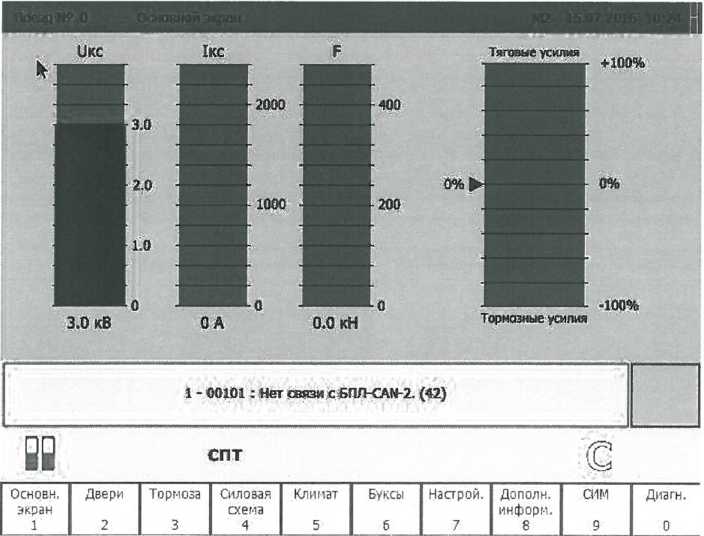
Рисунок 5.4 – Основной экран
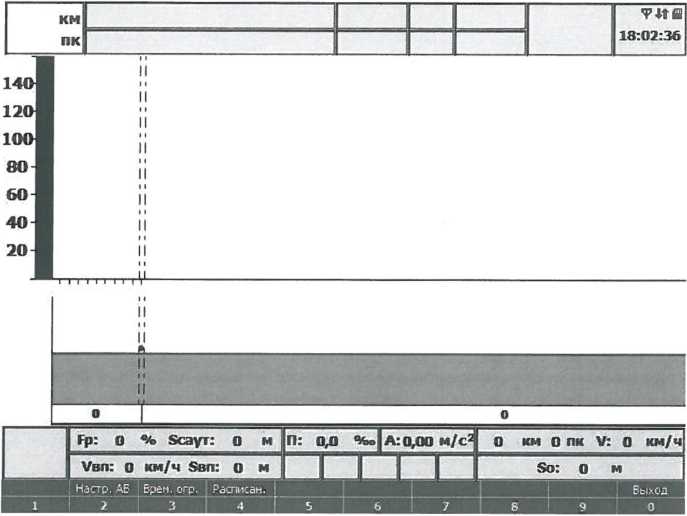
Рисунок 5.5 – Экран «СИМ»
В экране «СИМ» по кнопке 2 открыть вкладку «Настройки АВ» (рисунок 5.6).
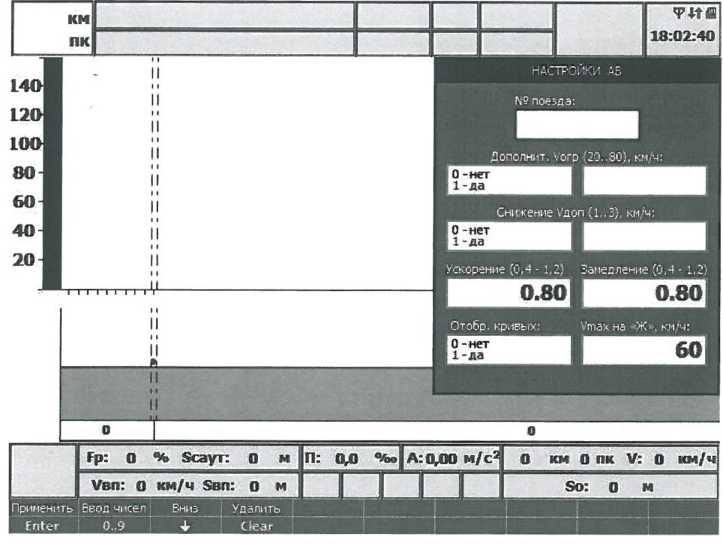
Рисунок 5.6 – вкладка «Настройки АВ»
Во вкладке «Настройки АВ» ввести № поезда и нажать «Enter». Убедиться в наличии расписания на введенный номер поезда в базе данных локомотива, для этого перейти по кнопке 4 во вкладку во вкладку «Расписание» (рисунок 5.7).
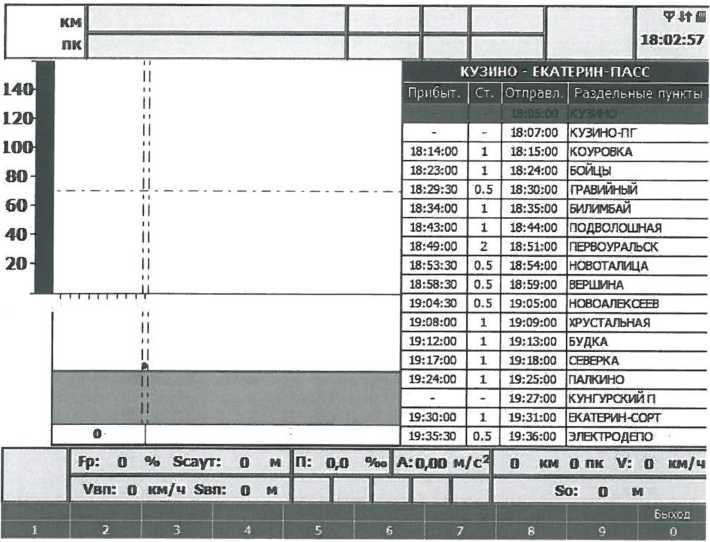
Рисунок 5.7 – Вкладка «Расписание»
В режиме АВ система выполняет расписание, отображенное во вкладке «Расписание».
После настройки АВ и при наличии данных от базы данных САУТ, в левом нижнем углу экрана «СИМ» загорается значок Советчик «С» (рисунок 5.8). Информация о постоянных ограничениях скорости, сигналов светофоров профиле пути и временах хода по перегонам в СИМ и АВ поступает из базы данных базы данных САУТ.
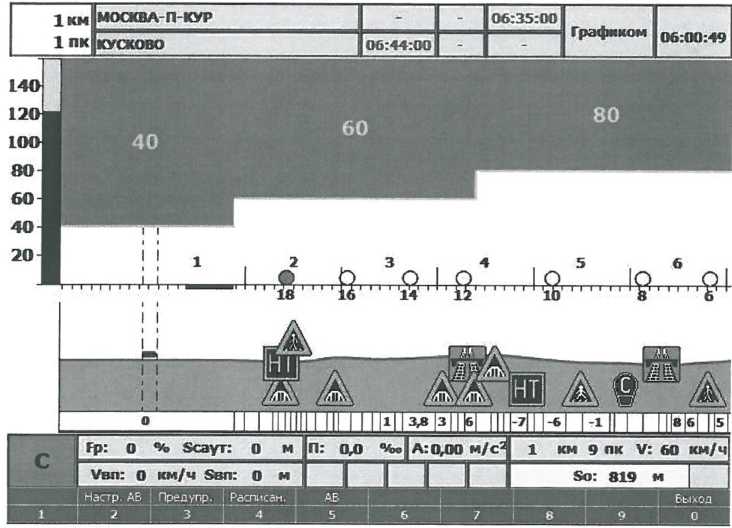
Рисунок 5.8 – Экран «СИМ»
Для ввода временных ограничений необходимо из экрана СИМ по кнопке 3 (рисунок 5.9) перейти в окно «Режим ввода и редактирования предупреждений».
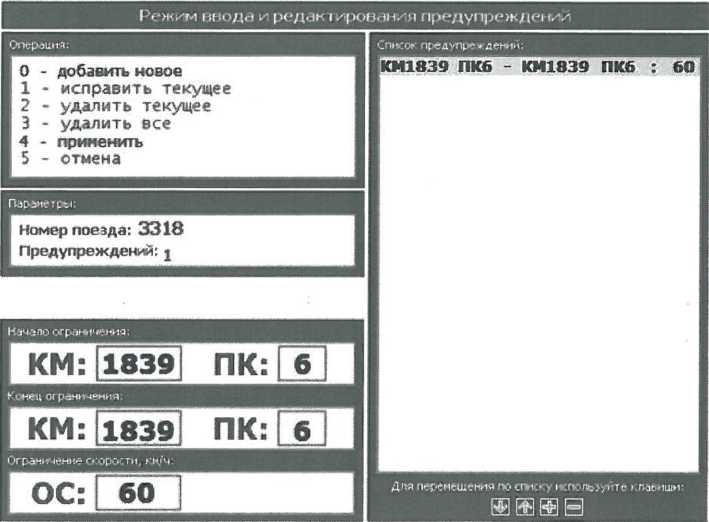
Рисунок 5.9 – Режим ввода и редактирования предупреждений
Ввод ограничений осуществляется последовательным нажатием с клавиатуры: начало ограничения, конец ограничения и скорость ограничения (пример КМ: 1890 ПК: 1. КМ: 1892 ПК: 10 ОС: 40). Впереди лежащие ограничения высвечиваются на экране «СИМ».
Примечание – временные ограничения можно вводить в любой момент времени: как в процессе подготовки системы АВ и СИМ к работе перед отправлением, так и в процессе движения поезда. Информация о текущей и впередилежащей станциях отображается на экране СИМ после выбора функции «Расписание».
5.7.3 Начало работы
Для активации режима автоведение необходимо в меню экрана СИМ нажать кнопку 5 «АВ» (рисунок 6) и после появления мигающей пиктограммы «АВ» в левом углу экрана СИМ, перевести джойстик из положения «0» в положение «Тяга» и обратно в положение «0» за время не более 2 с (выход из режима «АВ» в «С» осуществляется также по кнопке 5 на экране СИМ или любым воздействием на органы управления электропоезда).
СИМ-Монитор 1 и АВ допускают внесение изменений задаваемых локомотивной бригадой параметров как при подготовке к работе, так и в процессе движения поезда.
При необходимости локомотивная бригада может изменить такие параметры как:
- Дополнительное Voгp от 20 до 80 км/ч. Устанавливается постоянное дополнительное ограничение скорости движения по участку;
- Снижение Vдоп от 1 до 3 км/ч. Ограничивается достижение максимально допустимой скорости движения;
- Ускорение от 0,4 до 1,2 м/с2. Устанавливается максимальное ускорение с которым должен следовать электропоезд;
- Замедление от 0,4 до 1,2 м/с2. Устанавливается максимальное замедление с которым должен следовать электропоезд;
- Отображение кривых. На экране СИМ отображаются кривые по участку движения;
- Vmaxх на «Ж». Устанавливается максимально допустимая скорость проследования напольных светофоров с «Ж» показанием.
При этом если не нужно корректировать все данные, то соответствующие строки пропускаются нажатием стрелки “вниз”.
В случае добавления, изменения или удаления временных ограничений необходимо выбрать соответствующую операцию в меню редактирования предупреждений.
Настройка времени и даты в системе АВ и СИМ-Монитор 1 не требуется, данная функция предусмотрена в программном обеспечении Монитора МПСУиД.
5.7.4 Экран СИМ
Переход в экран СИМ возможен на левом мониторе из «Основного экрана» по кнопке 9. На экране СИМ (рисунок 5.10) в верхней части отображается информация о временах отправления, прибытия и стоянок по расписанию и названия ближайших станций.
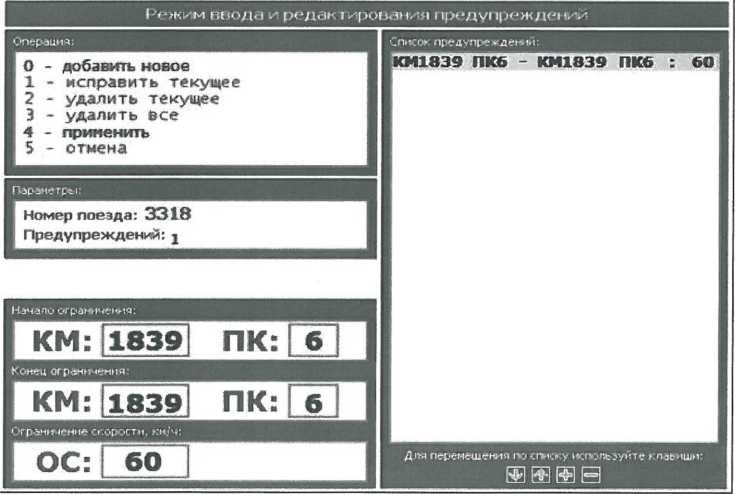
Рисунок 5.10 – Режим ввода и редактирования предупреждений
В поле «Информация о выполнении расписания» отображается текущее время выполнения расписания – графиком, опоздание или опережение. Незначительное опоздание или опережение на перегоне не критично, так как с учетом профиля оно будет компенсировано к моменту прибытия на очередную станцию.
В правом верхнем углу в поле времени отображаются 3 пиктограммы. Пиктограмма «антенна» информирует о наличии связи между сервером и аппаратурой (БРУС-МК), отвечающей за прием расписания, а пиктограмма «цветные вертикальные стрелки» информируют о передаче расписания движения на борт и других данных. В нижней части экрана отображается информация о режимах ведения поезда (АВ или С). В поле «Фактическая и расчетная сила тяги» отображается информация о величине указанных сил в процентах.
В СИМ-Монитор 1 отображается расположение поезда на профиле пути и координата местоположения по его голове, в виде пиктограмм отображаются путевые объекты, рекомендация о неиспользовании пневматического торможения в зоне КТСМ, а также координаты фактического местоположения светофоров и их сигналы, уклоны с соответствующими значениями, ускорение движению. По маршруту следования на экране схематически отображаются станции. В поле «Ограничение скорости» отображается информация об ограничениях скорости. При загорании желтого или красного сигналов светофоров отображается максимальное значение скорости, установленное инструкциями, при подъезде к ним в виде штриховой линии.
В СИМ-Монитор 1 предусмотрена возможность отображения занятости блок-участков при условии приема такой информации по радиоканалу на борт локомотива, а также информация о скорости движения и расстоянии до впередиидущего поезда при ее наличии. Индикатор допустимой скорости движения от СБ в СИМ отображается в левой части экрана вертикальным столбцом. Красный цвет индикатора информирует о максимально разрешенной скорости движения.
5.7.5 Проверка работоспособности АВ и СИМ-Монитор-1
При приемке локомотивов, оборудованных АВ и СИМ-Монитор 1 следует обращать внимание на следующие неисправности:
- отсутствие пиктограмм в поле «Информация о наличии связи и обмене данными» на мониторе СИМ-Монитор 1 (допускается кратковременное пропадание связи);
- отсутствие пиктограммы «наличии сим-карты» (определяет фактическое наличие сим-карты в блоке БРУС-МК).
- отсутствие пломб на шкафе приборов безопасности.
При выявлении выше перечисленных неисправностей при необходимости нужно сделать запись в журнале формы ТУ-152. При внесении замечания о не поступлении расписания указывать наличие пломб, указывать о наличии индикации пиктограмм на мониторе СИМ.
Проверка работы АВ и СИМ заключается в последовательном выполнении следующих этапов:
- Этап 1 – Подготовка к проверке
Для того, чтобы проверить работоспособность АВ и СИМ-Монитор 1 требуется во вкладке «расписание» ввести № требуемого расписания движения электропоезда. Для этого из экрана СИМ необходимо нажать кнопку 2. - Этап 2 – Проверка передачи данных
Проверка получения системами АВ и СИМ-Монитор 1 данных о путевой инфраструктуре возможна на стоянке вне крытого помещения с включенным устройством БЛОК, которое предоставляет возможность позиционирования по каналу спутниковой связи GPS и обеспечивает сигнал. Данные будут получены в случае:- наличия сигнала GPS;
- нахождении электропоезда в «пятне станции» выбранного расписания («пятно станции» – радиус в 2-3 км от оси станции)
Далее, необходимо войти в экран СИМ-Монитор 1 и подождать некоторое время для того, чтобы передались необходимые данные.
В результате выполненных действий после ввода информации в левом нижнем углу экрана СИМ загорается значок Советчик «С» (время ожидания может достигать 10 минут).
- Этап 3 – Проверка отображаемой информации в СИМ.
На рисунке 5.8 приведен полный состав информации отображаемой на экране. В условиях стоянки часть информации будет отсутствовать, например, не будет отображаться положение поезда на профиле пути, информация о занятости блок участков, значения токов и соответствующие соединения, скорость и расстояние впереди идущего поезда.
5.7.6 Установка программного обеспечения АВ и СИМ-Монитор 1
Программное обеспечение, далее ПО, АВ и СИМ-Монитор 1 устанавливается в Монитор 1 МПСУиД. Исполняемый файл ПО АВ и СИМ-Монитор 1 имеет название MONITOR. WIN и поставляется с исполняемыми файлами МПСУиД в составе руководства по эксплуатации 07Б.02.00.00 РЭ 50 Программное обеспечение МПСУиД для ЭСШ.
Установка ПО на электропоезде ЭСШ описана в руководстве по эксплуатации 07Б.02.00.00 РЭ 50 Программное обеспечение МПСУиД для ЭСШ.
5.8 Управление электропоездом в режиме «Круиз контроль»
Функция «Круиз контроль» предназначена для автоматического поддержания заданной скорости движения электропоезда.
Включение и отключение функции «Круиз контроль» осуществляется с пульта управления кабины машиниста двумя кнопочными выключателями «Скорость + » и «Скорость -».
При первом нажатии кнопки «Скорость + » в режиме «Тяга», устанавливается заданная скорость равной:
- значению текущей скорости движения электропоезда более или равной 1 км/ч;
- значению 5 км/ч при скорости электропоезда менее 1 км/ч.
При каждом кратковременном нажатии кнопки «Скорость + » или «Скорость – » значение заданной скорости будет меняться с шагом 1 км/ч, а при длительном нажатии (не менее 1,7 секунды) – с шагом 5 км/ч в большую или меньшую скорость соответственно.
Если заданная скорость больше фактической скорости на данный момент времени и разница между ними более 10 км/ч, то задается максимальная сила тяги.
Если заданная скорость меньше фактической скорости на данный момент времени и разница между скоростями более 10 км/ч, задается максимальная тормозная сила.
Во всех остальных случаях, когда разница между фактической и заданной скоростями менее 10 км/ч, то сила тяги и торможения рассчитывается и регулируется МПСУиД.
Отключение функции «Круиз контроль» происходит при любом изменении положения ручки контроллера тяга/торможение.