Управление тягой на электропоезде «Сапсан» осуществляется посредством передвижения контроллера тягового усилия 33 (см. рис. 10.1, далее — контроллера), который имеет при передвижении вперед (увеличении тяги) три фиксируемых положения: «0», «F», «F0». Дальнейшее нефиксируемое передвижение контроллера вперед — зона бесступенчатого регулирования тяговых усилий («широкий паз»), которая завершается конечным нефиксируемым положением «Fmax». Данная зона равномерно распределяет в себе значение тяговых усилий, выраженное в процентах, от 0 до 100.
Величина тяговых усилий (в процентах) отображается в виде столбцов гистограммы в окне «Основной экран» любого из ИЧМ (рис. 10.2). Поскольку максимальное значение силы тяги уменьшается с ростом скорости, увеличение процента тяговых усилий не всегда приводит к увеличению самой силы тяги. Так, например, 50 % тяги на скорости 100 км/ч (145 кН) больше 100 % тяги на скорости 200 км/ч (138 кН) (см. рис. 2.1).
Теоретически допускается использование даже 100 % тяговых усилий в любых условиях движения, поскольку на ЭВС имеется система контроля боксования; однако, как показывает практика, некоторые условия следования требуют ограничения тяговых усилий машинистом. Установлено, что при боксовании колесной пары восстановление нормального сцепления колеса с рельсом посредством системы контроля (без вмешательства машиниста) происходит за значительно большее время.
Поэтому при движении в условиях плохого сцепления целесообразно ограничивать силу тяги посредством контроллера: при первых признаках боксования уменьшать тягу, а также осуществлять подачу песка. Боксование отображается на гистограмме тяговых усилий ИЧМ: величина фактической тяги (синие столбцы) оказывается ниже процента тяги, заданной контроллером (треугольники розового цвета) (см. рис. 10.2).
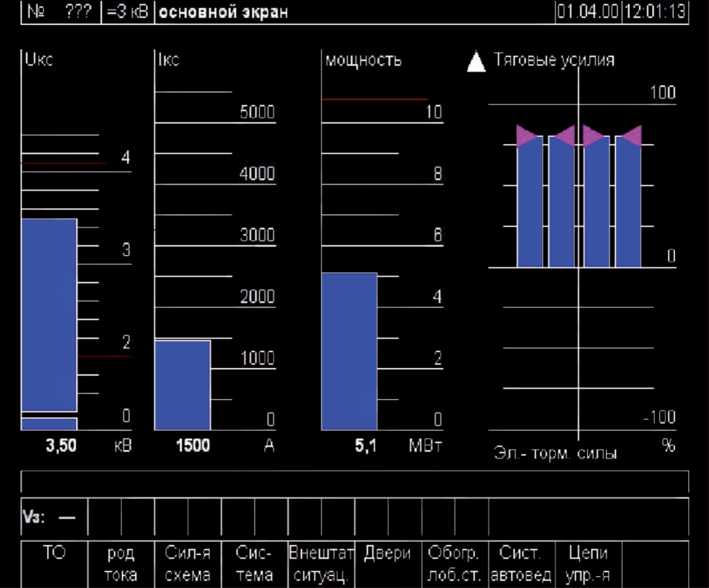
Рис. 10.2. Основной экран ИЧМ
Электропоезд «Сапсан» имеет жесткие сцепки, обеспечивающие комфорт при продольных реакциях в составе, однако при «грубом» управлении тягой (резкие увеличе-ния/сбросы тяги) все же имеют место «оттяжки», которые достаточно ощутимы. Напротив, аккуратное управление тягой (плавное увеличение/уменьшение (сброс) тяги — примерно 25 % за 3—5 с) позволяет осуществить практически незаметный выход на заданные величины ускорения. В данном случае речь идет о нарастании ускорения. Этика управления электропоездом «Сапсан» гарантирует комфорт пассажиров и обслуживающего персонала.
В летнее время в условиях высоких температур окружающего воздуха при использовании больших тяговых/тормозных токов возможно временное ограничение мощности привода отдельных моторных вагонов посредством автоматической системы контроля до 75 либо до 0 %. Использование максимальных токов, как правило, приходится на период разгона. Поэтому в условиях дефицита времени (когда требуются максимальные ускорения) при начале движения целесообразно переключать вентиляторы охлаждения из автоматического режима («Авт.») в режим «Макс.». Это обеспечит работу тягового привода без ограничения мощности, поскольку в данном режиме создается достаточный обдув нагревающихся элементов. По достижении необходимой скорости рекомендуется перевести вентиляторы в автоматический режим, поскольку тяговые токи к этому времени снизятся. (Для поддержания скорости, равной 200 км/ч, на прямом горизонтальном участке пути, при полной населенности поезда требуется около 20 % тяговых усилий.)
Управление тормозами
Тормозная рукоятка (далее ТР) имеет «0»-положение (поездное) и 10 тормозных положений: 1А, 1В, 2Т, 3Т, 4Т, 5Т, 6Т, 7Т, ПСТ (полное служебное торможение), ЭТ (экстренное торможение), — а также кнопку «Переключение режимов». Существует четыре режима торможения: нормальный режим, пропорциональный режим, режим «Тупиковый путь», режим «Чистка».
Нормальный режим не предполагает использование кнопки переключения режимов вообще (приоритетное использование системой ЭДТ).
Пропорциональный режим возникает при импульсном нажатии данной кнопки при торможении в нормальном режиме (на скоростях более 10 км/ч). В этом режиме мощность электродинамического торможения (ЭДТ) уменьшается в два раза (например, была 80 % — станет 40 %), а в ТЦ прицепных вагонов поступает необходимое давление воздуха, компенсируя снижающееся замедление (ступень ПТ). При этом суммарный тормозной эффект (замедление) останется прежним. Пропорциональный режим используется для равномерного распределения тормозного эффекта по всем колесным парам поезда (например, при «скользких рельсах»).
Режим «Чистка» активируется при нажатии и удерживании кнопки переключения режимов во время торможения при скорости более 10 км/ч. В данном случае прекращается ЭДТ и торможение всего поезда переводится на пневматическое. Давление в ТЦ здесь зависит, главным образом, от положения ТР.
Режим «Тупиковый путь» (в Германии применяется при следовании в тупиковый путь) возникает при импульсном нажатии кнопки переключения режимов при скоростях 10 км/ч и менее.
В данном случае ЭДТ замещается пневматическим торможением. При активации данного режима без увеличения скорости до значения более 10 км/ч выйти из него невозможно!
При движении со скоростью выше 20 км/ч по умолчанию включен нормальный режим. В случае постановки ТР в одно из тормозных положений система поезда приводит в действие электродинамический тормоз. В нормальном режиме изначально начинается рекуперация, а система отслеживает максимальное напряжение на токоприемнике и при достижении « 3,7 кВ плавно, частично или полностью переводит вырабатываемую энергию на тормозные сопротивления (реостаты) для ее гашения. Процесс перевода — обратимый, т.е. при вновь появившемся потребителе электроэнергии процент энергии, отдаваемой в контактную сеть, увеличивается вплоть до 100 %. Мощность чисто реостатного торможения составляет лишь 45 % от потенциально возможной мощности рекуперативного торможения. Это обусловлено мощностью тормозных реостатов. ЭДТ возможно при скоростях более 10 км/ч. При торможении в нормальном режиме, когда скорость снижается до 20 км/ч, автоматически происходит переключение на пропорциональный режим, который обеспечивает комбинированное торможение в диапазоне скоростей от 20 до 10 км/ч. Максимальная эффективность ЭДТ гарантируется в диапазоне скоростей 80—20 км/ч, когда может достигаться замедление до 48 % (относительно максимально возможного при 4 атм ПТ , т.е. примерный эквивалент 2 атм в ТЦ).
Для усиления тормозного эффекта необходимо перемещать ТР в последующие тормозные положения (вплоть до ПСТ). Сначала система под контролем блока управления торможением использует весь потенциал ЭДТ, затем при недостатке тормозного эффекта (определяемом расчетом некоего системного алгоритма) происходит компенсация этого недостатка соответствующей ступенью электропневматического торможения всех вагонов.
В режиме ЭДТ (актуально при больших тормозных мощностях), если система начинает улавливать скольжение (первые признаки юза) на каком-либо из моторных вагонов, тормозная мощность данного вагона автоматически понижается до величины, обеспечивающей устойчивое сцепление колеса с рельсом. Для компенсации прежнего (суммарного) тормозного эффекта поезда система «догружает» другие моторные вагоны, увеличивая их тормозные токи. Данный процесс автоматического регулирования отчетливо прослеживается на ИЧМ, где на гистограмме тормозных сил можно видеть их дисбаланс. Когда данная автоматическая регулировка по каким-либо причинам не может обеспечить необходимый тормозной эффект (например, рельсы загрязнены и ни один другой вагон не может реализовывать больший тормозной момент), система уменьшает тормозные токи на необходимую величину, а недостающий тормозной эффект компенсирует соответствующей ступенью пневматического торможения. (Применение такого алгоритма обусловлено более высокой скоростью срабатывания противоюзной системы при воздействии на пневматический тормоз. Временное различие в быстродействии в данном случае определяется сотыми долями секунды.) В случаях обнаружения машинистом подобных явлений в процессе торможения целесообразно снижать тормозную силу путем уменьшения позиции ТР (когда это позволяет поездная обстановка) либо переходить на пропорциональный режим торможения, применяя подачу песка.
С точки зрения комфорта для пассажиров, принята максимально допустимая величина ускорения (условно) в продольном направлении — 0,7 м/с2. Однако, как показывает практика, если применять в пути следования умеренные тяговые и тормозные силы, при которых величина ускорения/замедления не превышает 0,25 м/с2 в продольном направлении, то достигается полный комфорт, причем указанные ускорения/замедления практически не ощущаются пассажирами. Приведенные значения ускорений выполнимы при условии использования:
- тяги режимом не более 75 % мощности при скоростях до 120 км/ч, далее до 100 % мощности;
- ЭДТ с ТР в положении 1В в диапазоне скоростей 220—90 км/ч.
Использование небольших тормозных усилий, соответствующих положению ТР 1В в диапазоне скоростей 90—10 км/ч нецелесообразно, так как подобное «затягивание» уже существенно сказывается на соблюдении графика движения (потеря времени).
Надо заметить, что система управления поездом не контролирует фактическое (реальное) замедление в режиме торможения. Фактическая (реальная) тормозная сила
Вф = Всист + Всопр.движ.
Система управления поездом контролирует лишь слагаемое Всист, т.е. в процессе торможения на участке со спуском система не увеличивает тормозные усилия, и прежнее замедление не сохраняется в силу изменения воздействия второго слагаемого — Всопрдвиж. Данное обстоятельство необходимо учитывать машинистам при снижении скорости на спусках: не следует полагаться на то, что система торможения поддерживает замедление в соответствии с заданным положением ТР. Необходимо помнить, что даже некоторое видимое увеличение тормозных усилий на гистограмме ИЧМ не обеспечивает прежнего замедления и, как следствие, тормозной путь увеличивается.
При движении на подъем возникает обратная ситуация: при выходе с площадки на подъем система не уменьшает тормозные усилия, что приводит к логическому возрастанию замедления и, следовательно, к уменьшению тормозного пути.
Прохождение кривых участков пути
Из-за воздействия центробежных сил при прохождении кривых возникает непогашенное поперечное ускорение, которое находится в прямой зависимости от скорости движения и в обратной зависимости от радиуса кривой. Верхним пределом данной величины принято значение 0,7 м/с2, что является допуском по критериям комфорта для пассажиров и усилий, возникающих в элементах экипажной части подвижного состава. Для уменьшения непогашенного поперечного ускорения следует проходить кривые участки с минимально возможными (для каждой конкретной поездной обстановки) скоростями.
С точки зрения комфорта для пассажиров наибольшая компенсация боковых ускорений при прохождении кривых наблюдается при продольных нагрузках подвижного состава (тяга, торможение); однако использование максимальных значений тяги и особенно торможения создает достаточно высокие напряжения в экипажной части электропоезда, а также имеет место неблагоприятное воздействие на путь. Кроме того, большие тягово-тормозные усилия в кривых участках значительно увеличивают вероятность боксования или юза. Режим «выбега» минимизирует усилия в механической части, исключает боксование и юз, но дает некоторую свободу многовагонному подвижному составу. Абсолютное отсутствие продольных усилий исключает эффект «вытягивания состава», что не способствует повышению комфорта пассажиров. Еще одним из неблагоприятных режимов прохождения кривых является движение с максимальными скоростями при изменяющихся продольных усилиях (резкое увеличение/уменьшение силы тяги). Поперечные и изменяющиеся продольные усилия, возникающие при этом в поезде, способны образовывать реакции, несколько ухудшающие стабильность и равномерность движения состава, что неблагоприятно сказывается на комфорте пассажиров.
С учетом вышеизложенного оптимальный режим при прохождении кривых — следование в режиме тяги или торможения при постоянной продольной нагрузке величиной 25—50 % тяги/торможения (ЭДТ)*.
При необходимости использования значительных тяговых либо тормозных усилий в кривых участках пути целесообразно использовать подачу песка.
Управление пневматическими тормозами
Управление ЭДТ, комбинированными или пневматическими тормозами в штатном режиме осуществляется при помощи тормозной рукоятки FS-41 (=28-К04), расположенной на пульте машиниста. Управление исключительно пневматическими (электропнев-матическими) тормозами возможно после перехода в соответствующий режим, и лишь в следующих вариантах:
- в режиме «Тупиковый путь» (при движении со скоростью не более 10 км/ч);
- в режиме «Чистка» (при движении со скоростью более 10 км/ч);
- на стоянке.
Для получения давления в тормозных цилиндрах поезда необходимо перевести ТР из положения «0» в одно из тормозных положений. Таким образом подается сигнал менеджеру торможения, который в свою очередь воздействует на аналоговый преобразователь и посредством релейного клапана RH2 производит сброс давления ТМ на необходимую величину. Одновременно менеджер торможения посылает сигнал по поездной линии в каждый вагон, где происходит дополнительная разрядка ТМ посредством электромагнитных клапанов 02, 03 (синхронное распределение тормозной волны).
Уменьшение давления в ТМ приводит к срабатыванию воздухораспределителей вагонов на торможение. Величина давления в тормозных цилиндрах зависит от глубины разрядки ТМ. Необходимую глубину разрядки определяет менеджер торможения (БУТ-мастер), руководствуясь несколькими параметрами, один из которых определяется положением ТР.
При экстренном торможении, кроме электрических сигналов в БУТ, происходит прямой выброс воздуха ТМ в атмосферу посредством соответствующих клапанов.
Данная информация приводится с учетом имеющегося опыта эксплуатации высокоскоростного подвижного состава как в процессе испытаний, так и при обслуживании поездов с пассажирами и имеет сугубо эмпирический характер.
Экстренное торможение с разрядкой ТМ до «0» возникает:
- от разрыва ТМ;
- от воздействия петли экстренного торможения, которая срабатывает по сигналу, полученному:
- от ЭПК КЛУБ-У;
- аварийного ударного выключателя в кабине;
- аварийного ударного выключателя в купе начальника поезда;
- положения экстренного торможения ТР;
- петли № 2 (FUS);
- петли № 5 (DUS).
Как таковых электропневматических тормозов на поезде нет. Существует лишь функция синхронного распределения тормозной волны. В обычных условиях она включена и поддерживает необходимый алгоритм работы электромагнитных клапанов 02 и 03 преобразователей давления в каждом вагоне, которые обеспечивают одновременную раз-рядку/зарядку ТМ (Рнз = 5,0—5,2 атм).
При управлении тормозами необходимо помнить, что при скоростях свыше 190 км/ч максимально возможное давление в ТЦ автоматически ограничивается до 3 атм. Это связано с необходимостью защиты от перегрева тормозных дисков, а также с уменьшением сцепления колеса с рельсом при увеличении скорости движения.
Резервный кран
В случае отказа основной тормозной рукоятки или связанных с ней электронных систем, а также при движении в аварийном режиме машинист пользуется резервным тормозным краном после его активации. Данный кран управляет только пневматическими тормозами поезда, изменяя давление ТМ, и имеет пять положений:
- Зарядка и отпуск (с поддержанием зарядного давления в ТМ).
- Ступень отпуска (положение без фиксации).
- Перекрыша (нейтральное).
- Ступень торможения (разрядка УР и ТМ) без фиксации.
- Полное служебное торможение.
При управлении резервным тормозным краном следует иметь в виду, что УР достаточно мал, поэтому во избежание больших величин давлений в ТЦ ступени разрядки нужно делать небольшой величины.
Особенности управления тормозами в зимних условиях
Низкие температуры не оказывает существенного влияния на ЭДТ. Исключением является лишь ухудшение токопередачи между токоприемником и контактным проводом при рекуперативном торможении в случае сильного обледенения контактного провода. Однако данный вопрос не является актуальным, поскольку использование рекуперативного торможения электропоездов «Сапсан» имеет место лишь на путях главного хода, где сильное обледенение контактного провода — явление крайне редкое.
Иначе обстоит дело с фрикционными тормозами. Тормозные колодки изготавливаются из специального композиционного материала, коэффициент трения которого зависит от температуры. С уменьшением температуры он также уменьшается, следовательно эффективность торможения снижается. Результаты испытаний показали, что величины тормозных путей при одинаковых торможениях с начальной скорости 200 км/ч при t = + 15 °C и t = —15 °С имеют разницу до 1000 м. Кроме того, огромное влияние на тормозные пути оказывает обледенение тормозных дисков и колодок. Поэтому в пути следования необходимо периодически применять фрикционные тормоза с целью очистки дисков и колодок. С увеличением снежного покрова на пути ускоряется процесс обледенения и, следовательно, сокращается период времени, после которого необходимо производить очистку торможением. Машинист должен сам определять периодичность таких очисток в соответствии с метеоусловиями и фактической поездной обстановкой для поддержания тормозов поезда в постоянной готовности. Помимо этого, устанавливаются определенные места зимней проверки действия тормозов в пути следования. Такая проверка выполняется с использованием 5Т-положения ТР в режиме «Чистка» (удерживается кнопка переключения режимов на ТР). Перед станциями графиковых остановок, перед другими ответственными местами, требующими гарантированной остановки, необходимо дополнительно производить торможения для устранения обледенения тормозных элементов и прогрева тормозных дисков. Как показала практика, очистку и прогрев тормозных дисков необходимо производить, используя положение ТР не менее 3Т вплоть до ПСТ. Низкие положения ТР необходимого результата не дают. Недопустимо выполнение формальных очисток и прогрева, поскольку это создает реальную угрозу безопасности движения. Указанные торможения должны выполняться до получения желаемого тормозного эффекта, т.е. до тех пор, пока фактическое замедление поезда не начнет существенно возрастать.
Использование системы автоматического управления движением и торможением (АУДиТ)
Система АУДиТ предназначена для автоматического поддержания заданной скорости (аналог круиз-контроля). АУДиТ поддерживает заданную скорость вне зависимости от профиля пути, постоянно регулируя тяговые/тормозные токи в пределах от « —100 % » (торможение) до «+100 % » (тяга). Задатчик скорости 30 (=22-S01-S1) (см. рис. 10.1) используется для установления требуемой скорости.
Контроллер сохраняет свою функцию, как и при управлении в директорном (ручном) режиме.
Как правило, система АУДиТ используется при ведении поездов на протяженных участках и существенно упрощает работу машиниста.
Задаваемая скорость (отображается зеленым цветом на БИЛ-М) согласуется с данными КЛУБа-У, поэтому в любом случае она не может превышать допустимую скорость. При этом за соблюдение установленных скоростей движения несет ответственность машинист. В случае выявления в пути следования некорректной работы системы АУДиТ необходимо выключить ее и перейти на управление поездом в директорном (ручном) режиме.
Последовательность действий в процессе перехода на АУДиТ-режим
При переходе на АУДиТ-режим следует выполнять все действия в следующей строгой последовательности:
- переместить контроллер тяги в «0»;
- установить (предварительно) задатчик скорости 30 (см. рис. 10.1) в конечное положение «max»;
- выполнить на ИЧМ нажатие следующих функциональных клавиш:
- функциональная клавиша «8» — «Система Автоведения»;
- функциональная клавиша «8» — «АУДиТ Сист.Ав.»;
- функциональная клавиша «6» — «Подтв. V з.-зн.»;
- функциональная клавиша «0» — «Основной экран»;
- откорректировать (выставить) задатчиком необходимую скорость (окно индикации заданной скорости находится в левом нижнем углу первого дисплея);
- задать тяговое усилие контроллером тяги.
При следовании в режиме АУДиТ необходимо учитывать:
- при включении/выключении АУДиТ контроллер тяги 33 (см. рис. 10.1) должен быть в положении «0»;
- система АУДиТ предполагает использование всего диапазона тягово-тормозных усилий, поэтому при использовании АУДиТ целесообразно устанавливать контроллер тяги на «мах»;
- перед торможением вручную (тормозной рукояткой) необходимо переместить рукоятку контроллера тягового усилия в положение «0». Если начать торможение вручную, не сбросив тягу в положение «0», торможение произойдет, но в дальнейшем (для возобновления тяги) потребуется сброс контроллера тяги в положение «0» с последующей постановкой в одну из тяговых позиций.
Во время следования в режиме АУДиТ с заданной скоростью при перемещении рукоятки задатчика в сторону уменьшения скорости начнется торможение, которое будет стремиться вывести поезд на скорость, индицируемую в данный момент задатчиком.
При торможении задатчиком скорости снижение скорости будет происходить в соответствии с формулой
Гпуть = (AV) • 20 + 800 м.
При торможении задатчиком скорости на участках пути с ограничением скорости необходимо быть предельно внимательным и при недостатке тормозного эффекта (замедления) немедленно применять торможение с помощью основной тормозной рукоятки.
Система автоведения поезда (автопилот)
Система автоведения (далее — автопилот) электропоезда «Сапсан» представляет собой специально разработанную и установленную программу для реализации возможности следования электропоезда как в информационном режиме, так и в режиме автоматического (активного) ведения поезда. Ответственность за безопасность движения, соблюдение графика и качество ведения поезда возлагается на машиниста, в то время как задача автопилота — упрощение обслуживания. В каждом конкретном случае машинист принимает решение как о необходимости использования автопилота, так и о режиме его работы.
Перед использованием системы автоведения машинист должен:
- на блоке индикации КЛУБ-У ввести именно тот номер поезда, обслуживание которого будет осуществляться с использованием автопилота, поскольку КЛУБ-У и автопилот информационно связаны;
- в системе КБСУ проверить наличие загруженного файла с информацией о действующих предупреждениях на участке следования поезда, а также сверить данные ограничения в электронном виде с фактическими в выданном бланке предупреждения ДУ-61.
Следование в различных режимах
Следование в информационном режиме автопилота подразумевает лишь отображение в соответствующем окне интерфейса определенных данных о фактической и предстоящей обстановке без вмешательства в систему управления поездом (т.е. активное управление тягой и торможением поезда не производится). Отображается следующая информация:
- заданная системой автоведения скорость движения в определенный момент времени (соответствует скорости, установленной приказом «Н»; 23/34 ПТ; временные ограничения скоростей согласно выдаваемым предупреждениям на конкретный день в систему не заносятся), км/ч;
- фактическая скорость поезда в данный момент времени, км/ч;
- целевая скорость (значение ближайшего повышения или понижения скорости на впередилежащем участке), км/ч;
- расстояние до цели (расстояние до точки с целевой скоростью), м;
- графическое изображение заданной скорости (включая остановки) на впередилежащем участке 0—10 км (верхний график);
- графическое изображение профиля пути на впередилежащем участке 0—10 км (нижний график);
- километр фактического нахождения (под графиком профиля пути);
- вертикальная красная линия, проходящая через оба графика в пределах текущего километра, соответствующая фактическому местоположению поезда;
- индикация установленного режима автопилота (в левом нижнем углу дисплея):
- «Авто» — задан режим активного автоматического управления поездом;
- «Инф» — задан информационный режим автопилота;
- пустое окно прямоугольника информирует о выключенном автопилоте. В случае использования системы АУДиТ на данном поле отображается значение заданной скорости.
Режим автопилота также отображается на БИЛ КЛУБ-У (под символом вставленной кассеты регистрации) в виде соответствующей буквы:
- «И» — информационный режим;
- «А» — режим активного автоматического управления.
Порядок активации режимов автопилота
Для включения информационного режима автопилота необходимо выполнить следующее:
- задатчик скорости и контроллер тяги установить в положение «0»;
- в основном окне интерфейса-1 нажать программируемую клавишу «8» —«Сист. автовед.»;
- в открывшемся окне интерфейса-1 нажать программируемую клавишу «8» — «Круизк. автовед.»;
- в открывшемся окне выбора режимов выбрать информационный режим, нажав клавишу «8» — «Инф. автовед.»;
- вернуться в основное окно интерфейса, нажав клавишу «0» — «Осн. экран»;
- для вызова окна автопилота нажать клавишу «8» интерфейса-1.
В результате информационный режим автопилота включен.
Для включения режима активного ведения следует сделать следующее:
- установить задатчик скорости и контроллер тяги в положение «0»;
- в основном окне интерфейса-1 нажать программируемую клавишу «8» — «Сист. автовед.»;
- в открывшемся окне интерфейса-1 нажать программируемую клавишу «8» — «Круизк. автовед.»;
- в открывшемся окне «выбора режимов» нажать программируемую клавишу «8» — «Автовед. вкл.»;
- вернуться в основное окно интерфейса, нажав клавишу «0» — «Осн. экран»;
- для вызова окна автопилота нажать клавишу «8» интерфейса-1.
В итоге включен активный режим автопилота.
Для реализации тяги необходимо установить контроллер тяги в соответствующее положение.
Особенности эксплуатации
Активный режим автопилота требует постоянного контроля со стороны машиниста соблюдения требуемых параметров движения (скорости, своевременности воздействия на тягу и торможение, выполнения графика и т.п.).
При невключении (несвоевременном включении) тяги рекомендуется перейти на информационный режим автопилота или отключить его и следовать в директорном (ручном) режиме.
В случае неприменения (несвоевременного применения) тормозов автопилотом, а также если машинист считает, что автоматическое торможение недостаточно эффективно (в конкретном случае), необходимо незамедлительно применить торможение при помощи тормозной рукоятки с целью недопущения превышения скорости. После такого вмешательства возобновить автоматическое управление тягой возможно лишь после сброса контроллера тяги в положение «0» с последующей постановкой в положение тяги. При повторении подобных случаев рекомендуется отключение режима активного автопилота и переход на информационный либо директорный (ручной) режим.
Во всех других случаях некорректной работы автопилота рекомендуется его отключить.
Обо всех выявленных неисправностях, отклонениях, сбоях и несоответствиях в работе автопилота следует сделать запись в бортовом журнале ТУ-152.
В случае обслуживания поезда с использованием автопилота необходимо сделать запись об этом на обратной стороне бланка сдаваемого предупреждения.
Алгоритм автопилота построен таким образом, что для возобновления движения (получения тяги и отпуска ПТ) после остановки требуется в обязательном порядке:
- произвести разблокирование дверей (подача необходимого сигнала в систему);
- сброс контроллера тяги в положение «0» с последующей постановкой в тягу (рекомендуется ставить контроллер тяги в положение «0» заблаговременно, т.е. сразу после начала автоматического торможения на остановку).
В настоящее время версия программного обеспечения автопилота при следовании на остановку осуществляет автоматическое торможение не до полной остановки, а лишь до 2—3 км/ч следующим образом:
- в зоне минимальных скоростей происходит автоматическое импульсное (кратковременное) наполнение ТЦ примерно до 1 атм со снижением скорости поезда до 2— 3 км/ч и последующим отпуском ПТ (поезд катится);
- дальнейшее прицельное торможение должно осуществляться машинистом при помощи тормозной рукоятки вручную. В данном случае автоматически изменяется алгоритм работы ТР с целью обеспечения плавности остановки, т.е. при постановке ТР в тормозные позиции реализовываются значительно меньшие давления в ТЦ: 1А « « 0,3 атм; 1В « 0,4 атм; 2Т « 0,5 атм и т.д.
Автопилот не должен использоваться в режиме активного автоматического ведения поезда в следующих случаях, установленных местной инструкцией СЗ-ДОСС:
- при следовании по неправильному пути;
- при следовании с неисправными устройствами безопасности;
- при следовании по участку, не внесенному в электронную карту автопилота;
- при выполнении маневровой работы;
- при следовании с поездом, номер которого не внесен в электронную систему автопилота.
Активация любого режима автопилота исключает возможность использования режима АУДиТ, крайне удобного для реализации нагона опоздания, поэтому в случаях существенного отставания от графика машинист должен принять решение о целесообразности использования того или иного режима ведения поезда.