Назначение КЛУБ-У
КЛУБ-У (рис. 8.1) предназначено для приема и индикации сигналов от путевых устройств автоматической локомотивной сигнализации АЛСН и многозначной АЛС-ЕН, сигналов от промежуточных станций о местоположении впередиидущего поезда, показаний путевых светофоров и допустимой скорости движения, измерения и индикации скорости, определения координаты и времени по сигналам от спутниковых навигационных систем, для исключения превышения допустимой скорости и проезда светофоров с запрещающими сигналами, несанкционированного движения локомотива или МВПС, контроля бдительности и бодрствования машиниста, регистрации параметров движения на съемную кассету с последующей автоматизированной дешифрацией.
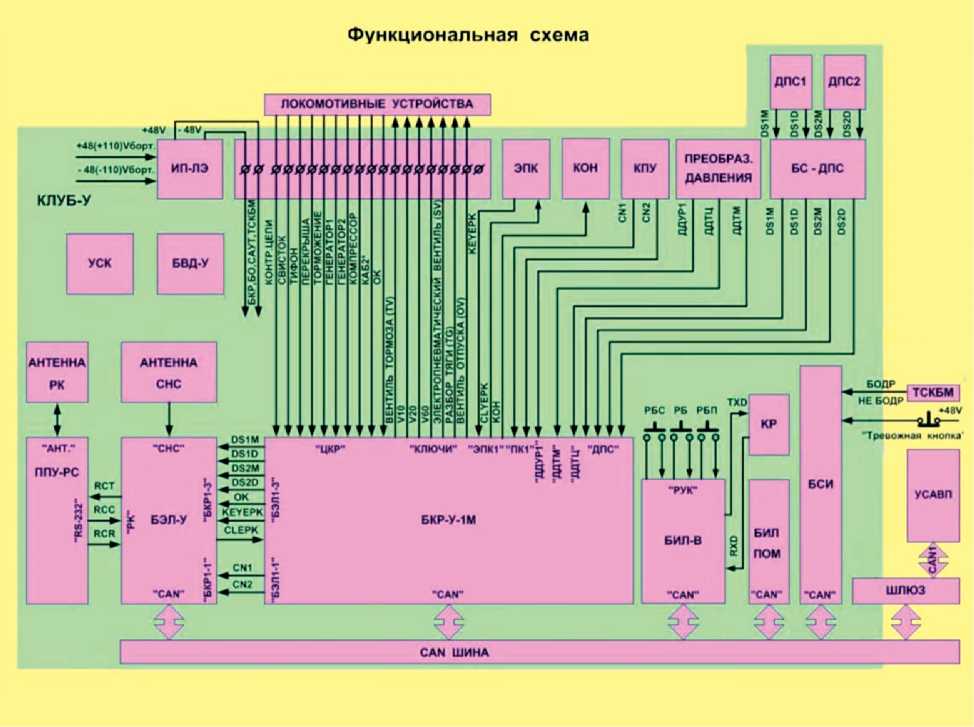
Рис. 8.1. Функциональная схема КЛУБ-У
КЛУБ-У обеспечивает безопасность движения высокоскоростного поезда и служит для предотвращения аварийных и предаварийных ситуаций в процессе движения путем принудительного торможения и остановки поезда.
Отличительными особенностями КЛУБ-У является модульная структура, наличие открытой локальной сети, позволяющей бесконфликтно увеличивать или уменьшать количество модулей (функций), а также регистрация параметров движения поезда, сигналов АЛСН, состояния тормозной системы и системы безопасности в съемную электронную кассету.
Эксплуатационные характеристики
- КЛУБ-У при отсутствии электронной карты ЭК при включении питания обеспечивает индикацию на КЛУБ-У БИЛ независимо от состояния ключа ЭПК следующей информации рабочей (активной) кабины электропоезда:
- координата пути, текущее время, давление в тормозной магистрали, давление в уравнительных резервуарах, давление в тормозном цилиндре, фактическая скорость 0 км/ч; ускорение, готовность кассеты регистрации (при наличии кассеты), несущая частота канала АЛСН (активность канала АЛС-ЕН), режим работы (поездной), номер пути, номер карты (кратковременно на 4 с), запрет отпуска, сигнал «ВНИМАНИЕ!» (кратковременно), «Включение радиоканала ТСКБМ» при условии включения ТСКБМ-Н, предварительная сигнализация ТСКБМ, запрос и подтверждение работоспособного состояния машиниста, сигнал локомотивного светофора, допустимая скорость, целевая скорость, сигнал «ВНИМАНИЕ!» (кратковременно при включении ЭПК).
- КЛУБ-У обеспечивает наличие на КЛУБ-У БИЛ в рабочей (активной) кабине электропоезда при включенном ключе ЭПК следующей информации, дополнительно указанной в п. 1:
- сигнал локомотивного светофора, соответствующий сигналу «АЛСН» («АЛС-ЕН»), поступающему из рельсовой цепи, шлейфа или из цифрового радиоканала; на участке, не оборудованном путевыми устройствами АЛСН (АЛС-ЕН) и цифрового радиоканала, должен индицироваться сигнал «Белый» («Б»);
- допустимая и целевая скорость в соответствии с принятым сигналом;
- кратковременный звуковой сигнал (при включении ключа ЭПК).
Индикация сигналов светофора на КЛУБ-У БИЛ-В-ПОМ и БИЛ-ПМВ должна соответствовать индикации на КЛУБ-У БИЛ.
- КЛУБ-У обеспечивает ввод во внутреннюю энергонезависимую память локомотивных и поездных характеристик (значения этих характеристик сохраняются при выключении питания КЛУБ-У):
- прием и запись во внутреннюю энергонезависимую память данных электронной карты пути и сохранение этих данных при выключении питания КЛУБ-У;
- переключение индицируемой на КЛУБ-У БИЛ информации «Сигнал светофора «Красный» («К»), допустимая скорость 20 км/ч» на информацию «Сигнал светофора «Белый», допустимая скорость движения на «Белый» сигнал светофора (Убел)» при одновременном нажатии рукояток бдительности РБ, РБП и кнопки ВК (РБ, ВК при управлении одним машинистом);
- в режиме работы «Поездной» формирование значения допустимой скорости на основании информации, поступающей из канала АЛС-ЕН;
- сравнение фактической скорости (Уфакт) движения с допустимой (гдоп) и снятие напряжения с электромагнита ЭПК, если фактическая скорость превышает допустимую;
- мигающую индикацию фактической скорости и прерывистый звуковой сигнал на КЛУБ-У БИЛ при допустимой скорости, равной фактической, а также при положительной разнице допустимой и фактической скорости менее 3 км/ч;
- функцию запрета несанкционированного движения (скатывание):
- в режиме работы «Поездной» включение сигнала «ВНИМАНИЕ!» с одновременным снятием напряжения с электромагнита ЭПК при наличии Гфакт > 0 км/ч (признака наличия импульсов от датчиков пути и скорости) при движении в течение не менее 30 с или при достижении скорости 2 км/ч, если контроллер не установлен в тяговую позицию во время движения. Кроме того, автостопное торможение произойдет, если Гфакт = = 2 км/ч, через более чем 70 с с момента установки контроллера в тяговую позицию.
- в режиме работы «Поездной» включение сигнала «ВНИМАНИЕ!» с одновременным снятием напряжения с электромагнита ЭПК при наличии Гфакт > 0 км/ч (признака наличия импульсов от датчиков пути и скорости) при движении не менее 30 с для маневровой категории поездов и при отсутствии установки контроллера в тяговую позицию во время движения или не менее чем за 120 с до начала движения при условии, что последняя установка контроллера в тяговую позицию производилась не более чем через 60 с после ввода команды «К263». Выключение сигнала «ВНИМАНИЕ!» и восстановление напряжения на электромагните ЭПК не производится при нажатии на рукоятки РБ, РБС, а осуществляется только после фиксации Гфакт = 0;
- снятие напряжения с электромагнита ЭПК при включении тяги машинистом и отсутствии сигналов от датчика угла поворота в течение последующих (76 ± 2) с;
- кратковременный звуковой сигнал на КЛУБ-У БИЛ при изменении передаваемых для индикации параметров: сигналов светофора, количества свободных КЛУБ-У-участков, движения прямо/с отклонением, режима работы — «Поездной», «Маневровый», «РДТ», вида препятствия; уменьшение целевой скорости, несущей частоты канала АЛСН, активности канала АЛС-ЕН, запрета отпуска тормозов, включения сигнала «ВНИМАНИЕ!»;
- однократную проверку бдительности (ОПБ) (включение сигнала «ВНИМАНИЕ!» и снятие напряжения с электромагнита ЭПК) при следующих условиях:
- условие 1 — момент снижения целевой скорости при ненулевой фактической скорости (отменяется при режиме работы «РДТ» при активности подсистемы САУТ, кроме перехода на сигнал светофора «КЖ»);
- условие 2 — переход на сигнал светофора «Б» при ненулевой фактической скорости;
- условие 3 — переход на сигнал светофора «К» при ненулевой фактической скорости;
- условие 4 — момент начала движения при сигналах светофора «К», «Красный с желтым» («КЖ») или «Б» (отменяется при режиме работы «Маневровый» или «РДТ»);
- условие 5 — по команде от подсистемы ТСКБМ;
- выключение сигнала «ВНИМАНИЕ!» и восстановление напряжения на электромагните ЭПК при нажатии одной из рукояток «РБ», «РБС» или при снижении фактической скорости до 0 км/ч;
- отсчет, индикацию и сохранение текущего времени с корректировкой по астрономическому времени спутниковой навигационной системы;
- определение координаты поезда от устройств спутниковой навигации, датчиков пути, скорости ДПС и электронной карты участка;
- измерение фактической скорости и формирование индикации фактической скорости на КЛУБ-У БИЛ с дискретностью 1,0 км/ч и наибольшей абсолютной погрешностью в диапазоне скоростей:
- от 0 до 80 км/ч ± 1 км/ч;
- от 81 до 250 км /ч ± 2 км/ч;
- индицирование на КЛУБ-У БИЛ значения давления тормозной системы в диапазоне от 0 до 1,0 МПа с дискретностью 0,01 МПа;
- исключение перехода на резервный комплект при изменении сигналов на входах КЛУБ-У при номинальных параметрах этих сигналов и активности любого из двух комплектов;
- проследование, запрет проследования светофора с запрещающим сигналом, а также возможность проследования по команде дежурного по станции, переданной по цифровому радиоканалу. Реализация данной функции должна выполняться следующим образом:
- при движении по ЭК к светофору с запрещающим сигналом по участкам, не оборудованным цифровым радиоканалом, КЛУБ-У должно осуществлять безусловное снижение допустимой скорости по кривой автостопного торможения до 0 км/ч. Для реализации возможности проследования светофора машинист должен нажать во время остановки при допустимой скорости менее 20 км/ч кнопку «ВК», расположенную на клавиатуре ввода, при этом допустимая скорость становится равной 20 км/ч;
- в случае движения без ЭК КЛУБ-У должно осуществлять снижение допустимой скорости по кривой автостопного торможения до 20 км/ч с возможностью «подтянуться» к светофору с запрещающим сигналом. При этом машинист должен обеспечить предварительную остановку не далее чем за 200 м до светофора с запрещающим сигналом;
- при движении к светофору с запрещающим сигналом по ЭК, в которой установлен признак наличия РК на станции для данного участка пути, КЛУБ-У должно осуществлять безусловное снижение допустимой скорости по кривой автостопного торможения до 0 км/ч. При этом от КЛУБ-У на диспетчерский пункт по РК автоматически посылаются запросы на разрешение проезда светофора с запрещающим сигналом. При получении разрешения на проезд от дежурного по станции на КЛУБ-У БИЛ должны индицироваться сигнал «БМ» и значение допустимой скорости 20 км/ч или выше, если локомотив не достиг точки автостопного торможения;
- при наличии ненулевой фактической скорости на индикации КЛУБ-У невозможность отключения ЭПК ключом, путем автостопного торможения через КЛУБ-У КОН через (11 ± 1) с после выключения ключа ЭПК, если к этому моменту величина давления в тормозных цилиндрах составляет менее 0,07 МПа (0,7 кгс/см2);
- формирование и индикацию на КЛУБ-У БИЛ плавного уменьшения допустимой скорости после получения сигнала «Б» до значения Гбед, если после получения сигнала «Б» Гфакт > Гбел при условии, что перед этим принимались сигналы «З» или «Ж». Значение гдоп должно плавно уменьшаться на 1 км/ч через каждые 50 м пройденного пути;
- сравнение сигналов, принимаемых по каналам АЛСН и АЛС-ЕН в случае приема по каналу АЛСН сигналов «Красный», «Желтый с Красным». Если по каналу АЛСН принимается более запрещающий сигнал светофора, который удерживается в течение не менее 4 с, то АЛСН становится более приоритетным, т.е. происходит принудительное отключение канала АЛС-ЕН. КЛУБ-У формирует и индицирует на КЛУБ-У БИЛ светофор, допустимую и целевую скорости сигнала канала АЛСН. Если в дальнейшем в течение не менее 2 с показания светофоров по АЛСН и АЛС-ЕН снова являются одинаковыми или по каналу АЛС-ЕН принимается более запрещающий сигнал, происходит активизация канала АЛС-ЕН и на КЛУБ-У БИЛ индицируются сигналы светофоров, допустимая и целевая скорость согласно данным, принимаемым из канала АЛС-ЕН;
- режим самодиагностики с выдачей информации на КЛУБ-У БИЛ;
- в режиме «Работа с двойной тягой» режим движения при «Движении по системе многих единиц»;
- формирование служебного торможения через приставку крана машиниста и экстренного торможения через электропневматический вентиль по команде, переданной по цифровому радиоканалу с пульта дежурного по станции;
- выявление боксования колесных пар (возрастание фактической скорости на величину 5 км/ч или более, за одну секунду) и в случае превышения фактической скорости — отмену снятия напряжения с электромагнита ЭПК при боксовании на время не более 10 с.
Устройство и работа блока электронного локомотивного БЭЛ-У
Несущей конструкцией блока (рис. 8.2 ) является корпус. Все узлы корпуса выполнены из алюминия и его сплавов методом штампования, литья и соединены винтами. Внутри корпуса расположен каркас, который крепится к корпусу винтами через изоляционные стойки.
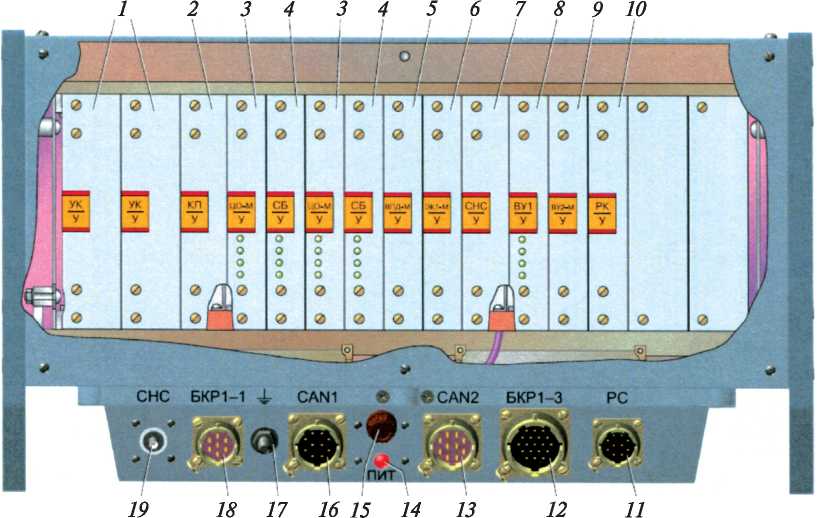
Рис. 8.2. Ячейки и соединители БЭЛ-У: 1 — ячейка УК-У; 2 — ячейка КП-У; 3 — ячейка ЦО-М-У; 4 — ячейка СБ-У; 5 — ячейка ВПД-М-У; 6 — ячейка ЭК1-М-У; 7 — ячейка СНС-У; 8 — ячейка ВУ1-У; 9 — ячейка ВУ2-М-У; 10 — ячейка РК-У; 11 — соединитель РС радиоканала; 12 — соединитель БКР1-3; 13 — соединитель CAN2; 14 — индикатор ПИТ наличия напряжения питания; 15 — предохранитель 6,3 А; 16 — соединитель CAN1; 17 — клемма заземления; 18 — соединитель БКР1-1; 19 — соединитель СНС кабеля антенно-усилительного устройства
Спереди в каркасе имеется кассета, на заднем шасси которой расположена объединительная плата. Ячейки движутся по направляющим кассеты и фиксируются в каркасе невыпадающими винтами с пружинными шайбами. Внизу корпуса есть окно, через которое производится электрическое соединение блока БВС-У с объединительной платой. Спереди и сзади корпуса имеются окна, которые обеспечивают доступ к объединительной плате.
Блок БЭЛ-У осуществляет прием, обработку и передачу информационных сообщений по линии CAN-интерфейса к другим устройствам из состава КЛУБ-У.
Описание и работа составных частей БЭЛ-У
На программном уровне ячейки объединяются в модули следующим образом (рис. 8.3):
- ячейки ЦО-М-У, СБ-У входят в модуль центрального обработчика (МЦО);
- ячейки ВУ1-У, ВУ2-М-У входят в модуль внешнего устройства (БВУ);
- ячейка ВПД-М-У входит в модуль измерителя параметров движения (ИПД);
- ячейки ЭК1-М-У, СНС-У (или МНП) входят в модуль маршрута (ММ);
- ячейка РК-У входит в модуль радиоканала (РК).
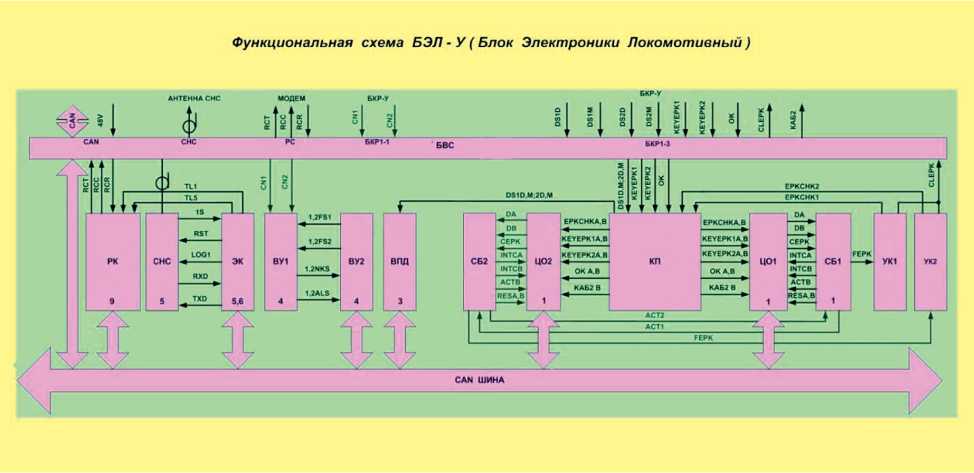
Рис. 8.3. Функциональная схема работы блока БЭЛ-У
Каналы обработки информации
В каждый из каналов входит микропроцессорное ядро, содержащее интерфейсы, асинхронный последовательный порт, CAN, порты ввода-вывода.
Асинхронный последовательный порт при отладке программного обеспечения служит для межпроцессорного обмена и связи с компьютером по интерфейсу RS-232, соединитель которого установлен на лицевой панели ячейки ЦО-М-У (далее ЦО-М).
Интерфейс CAN служит для связи с другими блоками КЛУБ-У по системной магистрали.
Порты ввода-вывода используются:
- для управления ЭПК посредством воздействия на ключевой оптрон безопасной схемы контроля ячейки СБ-У;
- контроля питания ЭПК, включения тяги локомотива, положения ключей ЭПК и управления локомотивом или МВПС из второй кабины посредством оптоэлектронных схем согласования уровней для 48-вольтовых входов, расположенных на ячейке КП-У;
- выдачи данных на схему контроля;
- распознавания номера комплекта, номера канала.
Конструктивно каналы обработки информации расположены в ячейках КП-У, ЦО-М и СБ-У. В ячейке КП-У находятся узлы, обеспечивающие связь схемы каналов с другими устройствами КЛУБ-У и локомотива или МВПС: источники питания, оптоэлектронные развязки 48-вольтовых входов, в том числе два ключа для сигналов от датчика скорости, идущих к ячейке ВПД-М-У. В ячейке ЦО-М расположены микропроцессорные ядра каналов А и В.
Безопасная схема контроля
Безопасная схема контроля состоит из двухканальной схемы формирования контрольной информации, собственно безопасного элемента контроля, усилителя сигнала ЭПК, схемы перезапуска и схемы переключения активности.
Узлы безопасной схемы контроля расположены в ячейках СБ-У и УК-У. В ячейке УК-У находится усилитель ЭПК, остальные узлы — в ячейке СБ-У.
Модуль внешнего устройства (БВУ)
На вход модуля БВУ поступают сигналы от приемных катушек (ПК), сигнал переключения частоты каналов (25, 50 или 75 Гц).
В состав БВУ входит приемник каналов АЛСН, АЛС-ЕН, независимый вторичный источник питания, элементы индикации, контроллеры CAN-интерфейса и гальванической развязки с внешними устройствами, а также вспомогательные элементы, необходимые при настройке и проверке устройства.
Модуль БВУ предназначен для выполнения следующих функций:
- прием от ПК амплитудно-манипулированных (АЛСН) и фазоманипулированных (АЛС-ЕН) сигналов, их фильтрование, выделение кодовых циклов;
- декодирование принятой информации согласно «Инструкции по сигнализации на железных дорогах России» и «Таблице соответствия показаний локомотивных индикаторов АЛС-ЕН, АЛС-ЕН-ТК и КЛСБ показаниям напольных светофоров» 3698200-01ТБ.
Формирование информации о числе свободных блок-участков, направлении движения прямо/с отклонением, наличии сигнала в канале АЛС-ЕН, несущей частоте канала АЛСН, о сигнальном показании по АЛСН (коды «КЖ», «Ж», «З»), типе кодового трансмиттера (КПТ-5, КПТ-7, КПТ-11); - защита от ложного приема разрешающего сигнала из канала АЛС-ЕН при сходе изолирующих стыков путем предотвращения приема информации при смене сигнала канала АЛС-ЕН «Желтый с красным» или «Белый мигающий» на информацию с несопряженной синхрогруппой;
- отслеживание прохождения границ блок-участков по смене синхрогрупп сигнала при приеме информации из канала АЛС-ЕН;
- формирование целевой скорости (Vцел), равной скорости проезда впереди стоящего светофора, по информации, принятой из канала АЛС-ЕН, или при ее отсутствии по информации, принятой из канала АЛСН, с учетом введенных локомотивных характеристик;
- при разрешающих сигналах светофора формирование гдоп равной контролируемой на предыдущем блок-участке, если гцед на текущем блок-участке меньше, чем на предыдущем. Формирования Vдоп равной Vдоп + 5 км/ч, если Vцед на текущем блок-участке больше или равна Vцел на предыдущем блок-участке;
- при показаниях светофора «Желтый с красным» и «Белый мигающий» формирование снижающейся до 20 км/ч Vдоп в соответствии с кривыми экстренного торможения, приведенными в «Таблице соответствия показаний локомотивных индикаторов АЛС-ЕН, АЛС-ЕН-ТК и КЛСБ показаниям напольных светофоров» 36982-00-01ТБ. При этом учитывается длина блок-участка, принятая из канала АЛС-ЕН. При отсутствии приема из канала АЛС-ЕН берется в расчет минимальная длина блок-участка, записанная в локомотивных характеристиках;
- формирование сигнала «Белый» при отсутствии информации из каналов АЛСН и АЛС-ЕН.
Время задержки на анализ смены кода «АЛСН» не превышает 7 с относительно смены кода в рельсовой цепи.
Перезапуск приемника каналов АЛСН, АЛС-ЕН осуществляется автоматически при включении питания в случае «зависания» программы.
Приемник каналов АЛСН, АЛС-ЕН содержит средства оперативной смены программ и вывода внутренних сигналов при их настройке и проверке.
Программное и аппаратное обеспечение контролирует правильность функционирования приемника каналов АЛСН, АЛС-ЕН и, в случае обнаружения нештатных сигналов, формирует сообщение об ошибке или неисправности.
Ячейка ВУ2-М-У предназначена для приема от ячейки ВУ1-У демодулированных сигналов «АЛСН» и «АЛС-ЕН», их декодирования и передачи результатов обработки по CAN-интерфейсу другим устройствам КЛУБ-У.
Ячейка ВУ2-М-У представляет собой два одинаковых микропроцессорных канала обработки информации, в каждый из которых входит микропроцессорное ядро, содержащее интерфейсы SPI и CAN, схему предобработки сигнала «АЛС-ЕН».
Интерфейс SPI предназначен для записи программного обеспечения в память микроконтроллера.
Интерфейс CAN служит для связи с другими устройствами КЛУБ-У по системной магистрали.
Значение частоты канала АЛСН, установленное перед последним выключением изделия, а также значение допустимой скорости на сигнал светофора «Б» хранятся в энергонезависимой памяти микроконтроллера, расположенного в ячейке ВУ2-М-У.
Модуль радиоканала (РК)
Модуль РК предназначен для обмена посредством радиомодема информацией с автоматизированной системой контроля АРМ ДСП и передачи результатов сеансов связи по CAN-интерфейсу другим устройствам КЛУБ-У.
Модуль РК представляет собой микропроцессорный канал обработки информации, в который входит микропроцессорное ядро, содержащее интерфейсы SPI, CAN и асинхронный интерфейс в стандарте минимального интерфейса RS-232.
Интерфейсы SPI и CAN работают так же, как и в модуле БВУ.
Интерфейс RS-232 предназначен для связи с радиомодемом.
На модуль РК через оптроны гальванической развязки поступают временные метки с периодом в 1 с и 5 с от приемника СРЗ для организации взаимодействия в системе автоматического оповещения.
Модуль маршрута (ММ)
В состав ММ входит электронная карта ЭК (ячейка ЭК1-М-У), приемное устройство системы спутниковой навигации (СНС), источник питания и схема реализации CAN-интерфейса.
ММ предназначен для приема и обработки сигналов от спутниковой навигационной системы GPS (NAVSTAR), или ГЛОНАСС, или комбинированной группы ГЛОНАСС/ GPS.
ММ определяет текущую координату (пройденный путь), расстояние до находящегося впереди препятствия, текущее время в часах, минутах и секундах с учетом перевода времени. Информация о текущем времени автоматически восстанавливается при включении питания устройства КЛУБ-У. Корректировка хода часов осуществляется с помощью информации от СНС.
ММ по электронной карте пути определяет блок-участок, на котором находится локомотив, направление движения, путь, вид препятствия.
Электронная карта (ЭК)
ЭК предназначена для хранения маршрутов движения локомотива. Информация в ЭК заносится перед первой поездкой и сохраняется при выключенном электропитании.
Внутренняя организация данных представляет собой описание характерных точек пути. Максимальный объем информации о характерной точке пути равен 30 байт.
Структура данных характерной точки пути:
- географические значения координаты точки пути (северная широта и восточная долгота);
- значение координаты точки в метрах;
- тип точки: станция, нейтральная вставка, токораздел, опасное место, мост, переезд, платформа, переход, путепровод, газопровод, ПОНАБ, тоннель, стрелка, точечный датчик ТКС, точечный датчик ТКС-САУТ, километровый столб, светофор;
- тип стрелки;
- номер стрелки;
- название станции;
- номер светофора;
- номер перегона.
Приемное устройство системы спутниковой навигационной системы (УПСН)
УПСН служит для приема информации, декодирования и обработки сигналов от всех видимых спутников ГЛОНАСС/GPS.
УПСН принимает значения географической широты и долготы, скорости в км/ч, текущего времени по Гринвичу и показателей качества принятой информации и сохраняет значения скорости за 25 циклов приема информации.
УПСН обновляет и передает информацию измерителю параметров движения не реже одного раза в секунду. После включения питания УПСН обеспечивает передачу данных не позднее чем через 5 мин.
После получения управляющего сигнала УПСН производит самотестирование.
УПСН работает в двоичном формате NMEA с устройством измерителя параметров движения и соединен с ним через стандартизированный порт RS-232.
Символы сообщений передаются в коде ASCII.
Измеритель параметров движения (ИПД)
ИПД предназначен для обработки данных, полученных от датчиков пути и скорости, и вычисления результирующего значения скорости и пройденного пути.
В состав ИПД входит устройство предварительного вычисления скорости по сигналам от датчиков пути и скорости, устройство вычисления окончательного значения скорости и пройденного пути и погрешности значений этих величин, а также устройство обмена с другими модулями КЛУБ-У.
Блок внешних соединений (БВС)
БВС предназначен для подключения к БЭЛ-У всех внешних устройств через соединители CAN1, CAN2, т.е. блоков БКР-У, БИЛ, БИЛ-ПОМ, БСИ, а также радиомодема через соединитель РК и антенно-усилительного устройства АУУ-1Н через соединитель СНС. Корпус предназначен для размещения внутри него плат с элементами и механического крепления блока к ответной части изделия.
На корпусе блока расположены:
- соединители для подключения к изделию вышеперечисленных устройств;
- предохранитель FU1 для защиты БЭЛ-У и внешнего источника питания от перегрузки по току;
- индикатор наличия напряжения питания;
- клемма заземления.
На плате блока размещены два соединителя, через которые внешние сигналы для анализа и дальнейшей обработки поступают на соответствующие ячейки.
На металлической пластине блока установлены и закреплены проходные конденсаторы и фильтры питания.
Плата элементов предназначена для установки на ней резистора в цепи индикации наличия напряжения питания и фильтров, используемых для повышения помехоустойчивости БЭЛ-У.
Плата объединительная предназначена для соединения между собой составных частей БЭЛ-У.
Устройство и работа блока коммутации и регистрации БКР-У-1М
Блок БКР-У-1М (рис. 8.4) входит в состав КЛУБ-У и предназначен для установки и работы в кузове подвижного состава в условиях вибрации, наличия пыли, электромагнитных полей и источников теплоизлучения.
Блок предназначен:
- для приема аналоговых сигналов от датчиков ДДУР1 давления в уравнительном резервуаре, датчиков ДДТЦ давления в тормозном цилиндре, и датчиков давления ДДТМ в тормозной магистрали;
- приема дискретных цифровых сигналов тифона «Тf», свистка, «0-контр», включения компрессора «Kom», контроля цепи «EptK», сигнала «Перекрыта» «EptP», сигнала торможения «EptT»;
- выдачи сигналов о движении со скоростью 10, 20, 60 км/ч и сигнала «KON» управления электропневмовентилем (ЭПВ);
- проведения предварительной обработки собранной информации с последующей передачей по CAN-интерфейсу другим устройствам КЛУБ-У;
- включения и подачи питания на блоки и устройства КЛУБ-У;
- формирования сигналов для служебного и экстренного торможения через приставку ПКМ крана ма-тиниста и электропневмовентиль, сигнала на разбор тяги.

Рис. 8.4. Внешний вид блока БКР-У-1М
Несущей конструкцией блока является корпус, все детали которого выполнены из стали методом штамповки и сварки.
Через соединители СНЦ23 блок БКР-У-1М соединяется с другими устройствами КЛУБ-У. Соединители имеют нанесенные на лицевой панели маркировки, соответствующие подключаемым устройствам: БЭЛ1-3, ЭПК1, БЭЛ1-1, ДПС, ПК1, ЦКР, CAN1-1, КЛЮЧИ, ДДУР1, ДДТМ, ДДТЦ.
Заземление блока осуществляется посредством клемм заземления с общепринятым обозначением. Плавкие вставки ДПС (5А) и ПИТ (8А) и тумблер питания (ПИТ) изделия расположены на лицевой панели.
Внутри корпуса установлены платы модуля микроконтроллера, реле, модуля ДК, на которых размещены элементы (рис 8.5).
Модуль микроконтроллера МК предназначен для приема аналоговых и дискретных цифровых сигналов, проведения предварительной обработки собранной информации с последующей передачей по CAN-интерфейсу другим устройствам КЛУБ-У. Модуль фильтрации ДК предназначен для фильтрации входных сигналов.
Ячейка управления ПР служит гальванической развязкой между модулем микроконтроллера МК и платой реле.
Плата реле служит для формирования сигналов служебного и экстренного торможения через приставку крана машиниста ПКМ и электропневмовентиль ЭПВ, а также сигнала на разбор тяги.
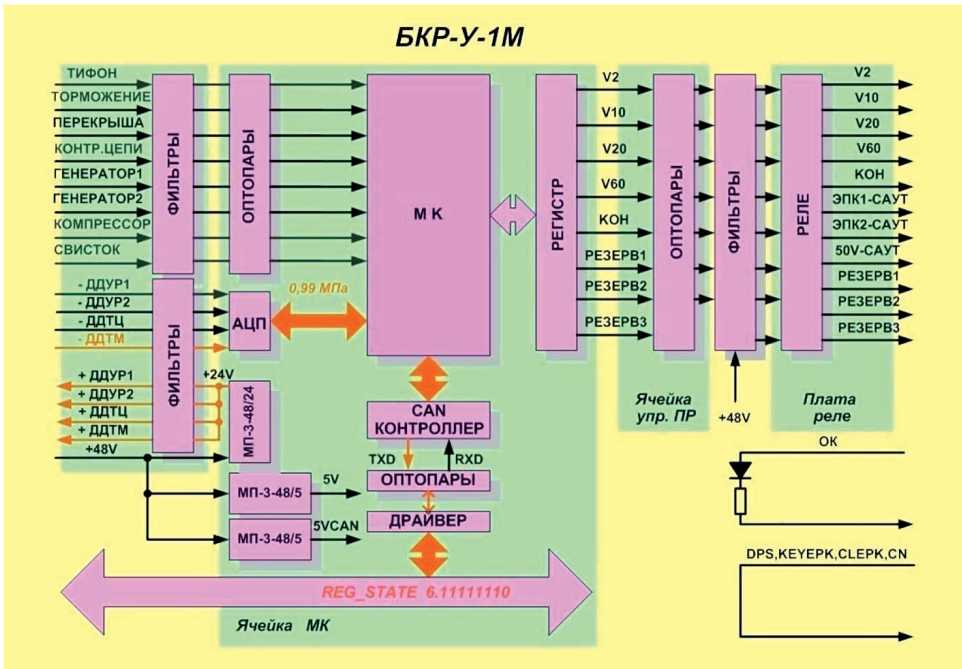
Рис. 8.5. Функциональная работа блока БКР
Плата объединительная предназначена для передачи сигналов между модулем микроконтроллера МК и ячейкой управления ПР.
Так как включение блока является одновременно и включением КЛУБ-У, предварительно необходимо выполнить подготовку КЛУБ-У к включению и только после этого установить тумблер ПИТ питания блока БКР-У-1М во включенное положение.
Блок индикации локомотивный модернизированный (БИЛ-М)
БИЛ-М (рис. 8.6) предназначен для индикации и ввода параметров в составе устройства КЛУБ-У с использованием ЖК-панели и современной микропроцессорной элементной базы.
На БИЛ-М может индицироваться различная информация в зависимости от выбранного режима функционирования КЛУБ-У:
- поездной (все режимы движения);
- диагностика внутренняя (проверка ПО, тормозного оборудования и т.д.);
- взаимодействие с другими системами.
При дальнейшем расширении функциональных возможностей КЛУБ-У на БИЛ-М могут быть предусмотрены другие режимы индикации.
Яркость индикаторов и ЖК-панели БИЛ-М регулируется в диапазоне от 25 до 500 кд/м2 как вручную, так и автоматически в зависимости от внешнего освещения.
Блок имеет встроенную диагностику, обеспечивающую контроль неисправностей.
В состав блока входят следующие основные модули:
- модуль вычислителя и видеоконтроллера;
- модуль индикации;
- модуль ввода;
- модуль формирователя речевых сообщений.

Рис. 8.6. Внешний вид блока БИЛ-М
Блок БИЛ-М предназначен:
- для выдачи машинисту оперативной и служебной информации КЛУБ-У и автоматизированной комплексной системы управления высокоскоростным поездом (АКСУВП);
- взаимодействия с машинистом посредством рукояток РБ, РБС, РБП из состава КЛУБ-У;
- ввода и отображения локомотивных и поездных характеристик;
- регистрации оперативной информации о движении поезда, диагностики КЛУБ-У, локомотивных и поездных характеристик в кассете регистрации (КР);
- задания предрейсового тестирования составных частей КЛУБ-У.
Электропитание БИЛ-М осуществляется от блока БЭЛ-У из состава КЛУБ-У напряжением (48 ± 7) В. Величина тока потребления не более 1,1 А.
БИЛ-М выдает звуковые сигналы при изменении наиболее важных параметров движения.
Блок регистрации БР-У
БР-У (рис. 8.7) предназначен для записи на кассету регистрации параметров поездной обстановки (оперативной информации о движении поезда, диагностики системы, записи локомотивных и поездных характеристик) в активной кабине, из которой осуществляется управление локомотивом или моторвагонным подвижным составом.
Электропитание БР-У 36991-345-00 осуществляется от блока БКР-У-1М номинальным напряжением (48 ± 7) В и током потребления не более 0,2 А.
Основными сборочными единицами являются:
- корпус;
- модуль регистрации (МР);
- кассетоприемник.

Рис. 8.7. Внешний вид блока регистрации и кассеты регистрации
Несущей конструкцией является корпус. Все детали корпуса выполнены из стали методом штамповки и сварки.
На лицевой панели изделия установлен кассетоприемник. На корпусе размещены:
- соединители типа СНЦ23;
- клемма заземления.
Внутри корпуса установлена плата модуля регистрации, на которой размещены элементы. Помехоподавляющий фильтр, состоящий из дросселей и конденсаторов, находится на дне корпуса.
БР-У осуществляет прием информационных сообщений из КЛУБ-У по CAN-линии, их преобразование и запись на кассету регистрации, устанавливаемую в кассетоприемник блока БР-У.
Блок согласования интерфейсов (БСИ)

Рис. 8.8. Внешний вид БСИ
БСИ (рис. 8.8) входит в состав КЛУБ-У и предназначен для установки в кузовах локомотивов для подключения к КЛУБ-У и ТСКБМ, не имеющим открытого унифицированного CAN-интерфейса.
При напряжении питания 48 В величина тока, потребляемого блоком от источника питания постоянного тока, должна составлять не более 0,2 А.
Блок сохраняет свою работоспособность при изменении напряжения питания в пределах (48 ± 7) В.
Работа блока осуществляется под управлением микропроцессора, который производит:
- прием и передачу по CAN-линии информационных сообщений устройства КЛУБ-У;
- прием и передачу управляющих сигналов к системам САУТ и ТСКБМ через микросхемы DA6—DA17.
Блок связи БС-ДПС
БС-ДПС (рис. 8.9) предназначен:
- для передачи импульсов от двух датчиков угла поворота одновременно двум (пяти) системам-потребителям;
- передачи информации о пройденном пути, текущей скорости и ускорении в кодовую линию связи;
- обеспечения гальванической развязки между системами-потребителями и ДПС;
- контроля работоспособности датчиков с выдачей сигнала «Исправность» по каждому каналу на индикацию и для систем-потребителей.

Рис. 8.9. Внешний вид блока БС-ДПС
Конструктивно блок БС-ДПС состоит из корпуса с крепежными планками и передней панели.
В нижней части корпуса установлены блочные части соединителей для внешних потребителей, подключения датчиков угла поворота, подачи напряжения питания и линии. В верхней части корпуса имеется кнопка сброса неисправностей. На переднюю панель выведены индикаторы исправности каждого канала обоих датчиков ДПС.
Блок БС-ДПС связи состоит из модуля БС-ДПС и преобразователя ВИП-ДПС. В модуле БС-ДПС размещена схема гальванической развязки по сигналам датчика, микроконтроллеры двух полукомплектов, формирующие сигналы исправности датчиков и обеспечивающие обмен по кодовой линии связи RS-485. Преобразователь ВИП-ДПС осуществляет гальваническую развязку и питание напряжением 5 В логической схемы модуля БС-ДПС и питание напряжением 15 В выходных ключей датчиков угла поворота для каждого датчика в отдельности.
Модуль БС-ДПС состоит из устройств гальванической развязки по сигналам датчиков В1—В4, формирователя с гальванической развязкой С1—С4, логического блока, ключей с гальванической развязкой А1—А4.
Устройства гальванической развязки В1—В4 обеспечивают размножение сигналов от датчиков угла поворота (блока для двух потребителей), гальваническую развязку между датчиками и потребителями, а также потребителями между собой.
Логический блок модуля БС-ДПС представляет собой блок анализа сигналов датчиков угла поворота, состоящий из двух полукомплектов. Каждый из двух полукомплектов включает микропроцессор АТ9088535-8А1 с супервизорами питания на микросхеме КР1171СП42. В качестве тактового генератора обоих полукомплектов используется встроенный в микросхему ВВ1 генератор с кварцевым резонатором и двумя конденсаторами. Обмен по кодовой линии связи RS-485 ведут оба микропроцессора через приемопередатчик на микросхеме АБМ485АК.
Через объединенные выходы двух полукомплектов (сигналы «МО81», «М18О», «8СК», «К8Т1», «К8Т2») возможно перепрограммирование памяти программ соседнего полукомплекта по данным, получаемым по линии связи RS-485.
Импульсные сигналы всех четырех каналов обоих ДПС после формирования поступают на порты микроконтроллеров двух полукомплектов. Микроконтроллеры ведут непрерывную программную обработку поступающих сигналов. Скорость и ускорение вычисляются по каждому датчику в отдельности, но в линию связи RS-485 эта информация поступает от того датчика, который выбран на данный момент по условиям движения: в режиме тяги — от датчика с минимальной частотой вращения, а в режиме торможения или выбега — от датчика с максимальной частотой вращения. Кроме того, в линию связи непрерывно передается пройденный путь в виде состояния счетчика, объем которого составляет 6554 м. Инкремент счетчика осуществляется через каждые 0,1 м пути.
Для вычисления параметров движения используются диаметры бандажей обоих колесных пар, которые записываются в БС-ДПС с помощью БПРУ-САУТ-ЦМ, а также с помощью стенда КПА.
БС-ДПС также вычисляет и передает в линию связи направление вращения обоих ДПС, сигналы исправности по каждому каналу и номер выбранного в данный момент датчика. Программа обработки непрерывно анализирует исправность каналов обоих датчиков.
Алгоритм анализа исправности каналов датчиков угла поворота.
Для индикации исправности каналов датчиков при визуальном контроле используются четыре светодиода, на которые во время движения локомотива от микроконтроллера через схему формирования поступают импульсы формы меандра с частотой, в 16 раз меньшей частоты импульсов датчиков. При исправных каналах светодиоды будут гореть периодически при малых скоростях движения локомотива и с «подмигиванием» — при больших скоростях.
При неисправном канале датчика соответствующий ему светодиод не горит.
Если во время движения локомотива произошло кратковременное нарушение работоспособности какого-либо канала, то соответствующий светодиод не будет гореть только во время нарушения работоспособности, но информация запишется в программируемую память.
Во время остановки на светодиоды выводится информация из программируемой памяти об исправности (неисправности) соответствующих каналов ДПС. Неисправный канал индицируется отсутствием свечения светодиода. Информация выводится через некоторое время после остановки (до 10 с).
При выключении питания эта информация сохраняется в программируемой памяти, и после включения через некоторое время она вновь выводится на светодиоды.
При опросе каналов датчиков производится следующий анализ:
- контролируется чередование фронтов импульсов каналов в каждом датчике. Если в течение 16 периодов импульсов, поступающих из датчиков в микроконтроллер, чередование отсутствует, то делается вывод о неисправности канала, по которому импульсы не поступают. Эта информация записывается в программируемую память и сохраняется до момента стирания кнопкой «СБРОС», даже если произошло восстановление работоспособности канала датчика;
- контролируется наличие «дребезга» на фронтах импульсов датчиков, для чего производится анализ времени между соседними фронтами в импульсной последовательности каждого канала. Если оно меньше 150 мкс, то соответствующий фронт пропускается;
- контролируется остановка датчиков. Если в течение 30 с импульсы не поступают по обоим каналам одного из датчиков, то делается вывод об остановке соответствующего датчика. В то же время проверяется наличие сигнала остановки другого датчика. Этот сигнал будет вырабатываться при отсутствии поступления импульсов по обоим каналам от второго датчика. Если имеется сигнал остановки от обоих датчиков, то вырабатывается сигнал общей остановки и на светодиоды выдаются сигналы исправности всех каналов датчиков, а также осуществляется запись этой информации в ППЗУ данных. В противном случае, т.е. когда сигнал остановки для второго датчика не вырабатывается, делается вывод о неисправности обоих каналов останавливающегося датчика.
Стирание информации, записанной в программируемую память, осуществляется путем нажатия кнопки «СБРОС» на корпусе блока БС-ДПС связи при наличии напряжения питания.
При каждом выводе информации о неисправности в датчиках при анализе их работоспособности по вышеприведенному алгоритму сигнал «Исправность», создаваемый микроконтроллером для систем-потребителей, снимается.
Датчики угла поворота ДПС-У
Датчики ДПС (рис. 8.10) угла поворота применяются в составе локомотивной аппаратуры и предназначены для формирования электрических сигналов, пропорциональных скорости движения поезда. Связь оси модулятора ДПС с осью колесной пары локомотива осуществляется без редуктора.
Датчик имеет два идентичных канала. Сигналы каждого канала сдвинуты между собой на четверть периода следования импульсов. Период следования определяется частотой вращения колесной пары. Два канала необходимы для определения направления движения локомотива.
Преобразование угла поворота в количество импульсов происходит в результате модуляции оптического потока, излучаемого светодиодом. Диск с пазами (модулятор) вращается синхронно с осью колесной пары (рис. 8.11). Фототранзистор, находящийся на одной оси со светодиодом, преобразует оптический поток в электрический сигнал (рис. 8.12).
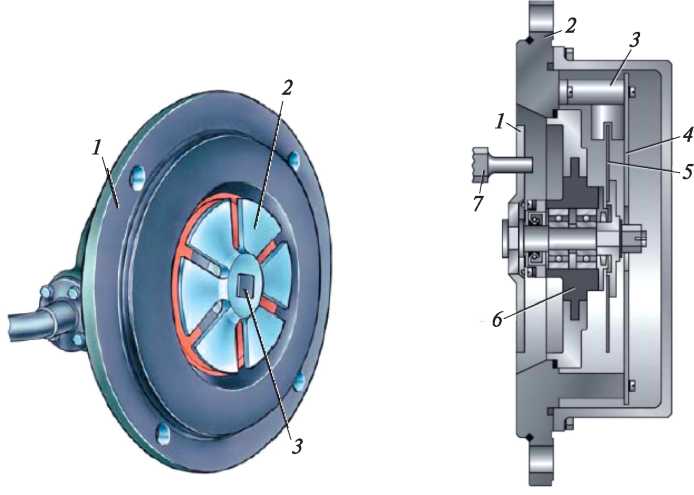
Рис. 8.10. Общий вид и поперечный разрез датчика ДПС-У: 1 — полумуфта; 2 — фланец; 3 — кронштейн с опорами; 4 — плата; 5 — диск с пазами (модулятор); 6 — подшипниковый узел; 7 — палец
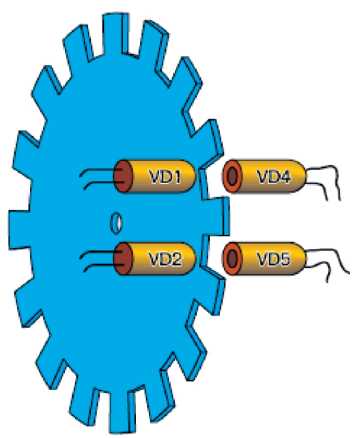
Рис. 8.11. Модулятор датчика угла поворота
При подаче напряжения питания на датчик светодиод будет постоянно излучать световой поток в инфракрасном диапазоне. Фототранзистор будет его принимать только тогда, когда щель диска войдет в область диаграммы направленности фототранзистора.
Таким образом, при вращении диска на коллекторе фототранзистора будет формироваться импульсная последовательность с количеством импульсов за один оборот диска, равным количеству его щелей.
Для получения импульсной последовательности со стабильными по времени длительностями импульса и периода служит формирователь фронтов импульсов, состоящий из транзисторного ключевого каскада и компаратора. Компаратор также обеспечивает ограничение импульсной последовательности понизу на уровне порогового напряжения и тем самым предотвращает появление «паразитных» импульсов, которые могут формироваться из-за флюктуаций, возникающих на выходе фототранзистора.
С выхода компаратора импульсная последовательность поступает на формирователь сигналов ДПС, который состоит из двух транзисторных ключевых каскадов. Последний каскад выполнен по схеме «открытый коллектор».
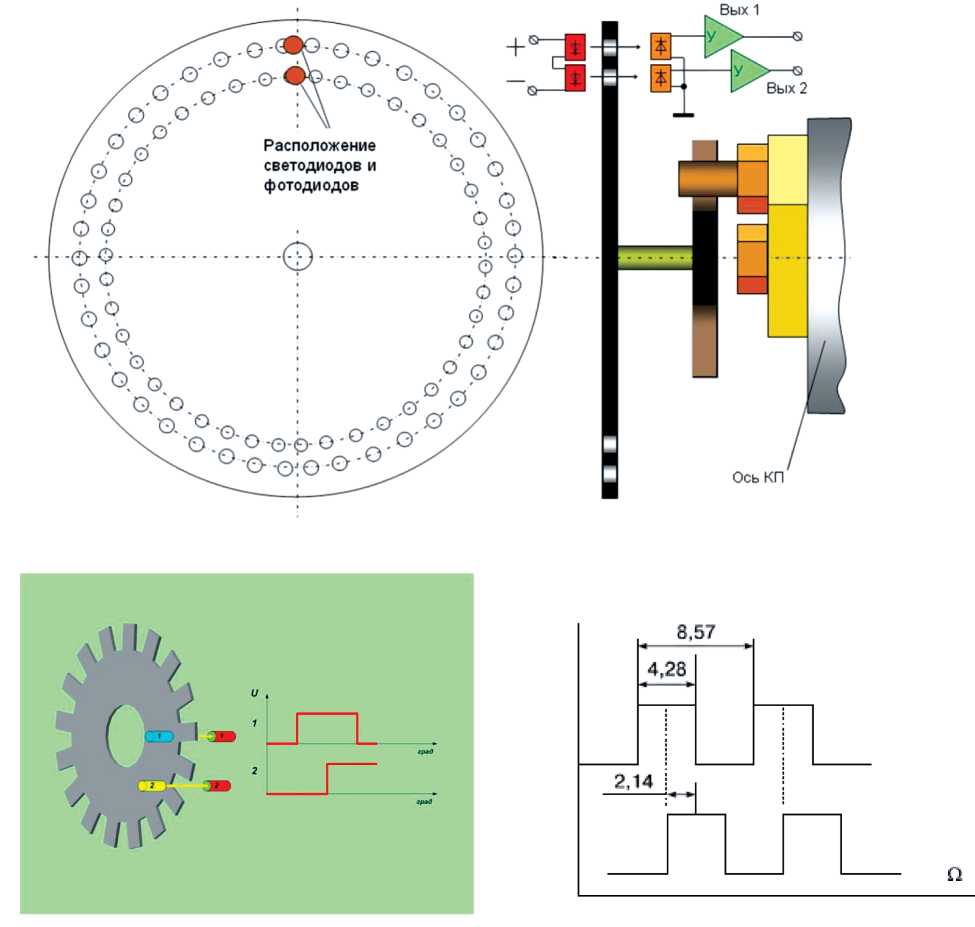
Рис. 8.12. Диаграмма сигналов: Q — угол поворота вала модулятора, град.
Катушка приемная (КП)
КП предназначены для эксплуатации на локомотивах в составе автоматической локомотивной сигнализации непрерывного типа числового кода, многозначной АЛС и других типов АЛС. Приемные катушки устанавливаются на высоте 150 мм от поверхности головки рельса на раме тележки или на элементах экипажной части (рис. 8.13).
КП состоит из сердечника прямоугольной формы, набранного из пластин электротехнической стали. На сердечнике на двух каркасах намотана двухсекционная обмотка. Каркасы секций обмотки до их заливки диэлектриком могут перемещаться относительно середины сердечника для более точной регулировки индуктивности КП. С двух сторон на сердечнике установлены фиксирующие скобы каркасов КП. Сердечник с обмоткой помещен в корпус, который выполнен из силумина, предохраняет катушки от механических воздействий и снижает уровень наводок (помех), идущих от МВПС или локомотива при его работе и при прохождении состава под ЛЭП. Торцы сердечника КП помещены в торцевые крышки, выполненные из диэлектрического материала. Материал торцевых крышек и вариант конструкции корпуса КП выбраны с учетом условий получения заданных электрических характеристик. Торцевые крышки с помощью винтов закреплены на корпусе и фиксируют сердечник в требуемом положении. Для улучшения герметичности и усиления прочности крепления сердечника с обмоткой в корпусе катушки залиты винсинтом К-68. Нижняя часть корпуса КП закрыта крышкой, изготовленной из диэлектрика.
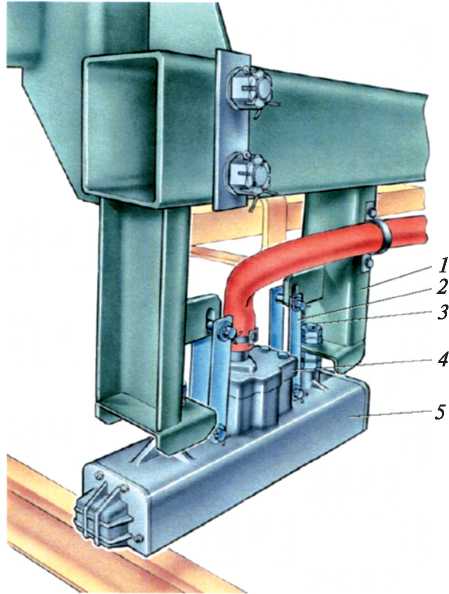
Рис. 8.13 Установка приемной катушки КПУ-1: 1 — кронштейн подвески; 2 — предохранительное устройство; 3 — регулировочные шпильки подвески катушки; 4 — крышка клеммной коробки; 5 — корпус катушки
Принцип действия обмотки КП (рис. 8.14, 8.15) основан на законах электромагнитной индукции. Электрический сигнал локомотивной сигнализации, передаваемый по рельсам или шлейфу, создает вокруг них электромагнитное поле. КП расположены на локомотиве или МВПС так, что постоянно находятся в магнитном потоке поля. Передаваемый сигнал индуктивным способом воспринимается КП и поступает в локомотивные приемники устройств АЛС.
Правильная фазировка КПУ
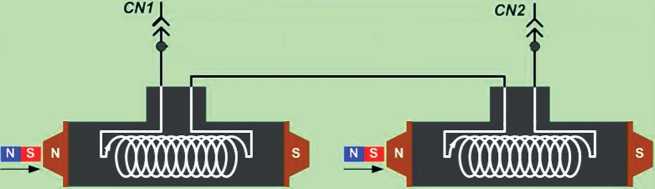
Рис. 8.14. Принцип работы приемной катушки
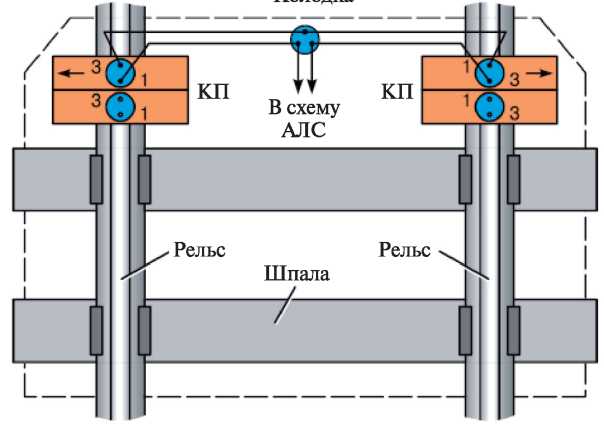
Рис. 8.15. Подключение приемных катушек
Преобразователи давления (КРТ)

Рис. 8.16. Общий вид преобразователя давления
КРТ (рис. 8.16) предназначены для измерения избыточного давления и избыточного давления-разрежения, а также для непрерывного пропорционального преобразования давления в унифицированный выходной сигнал постоянного тока 4—20 мА, используемый в качестве входного в аппаратуре систем автоматического контроля, регулирования и управления технологическими процессами.
Преобразователи изготавливают в двух исполнениях по взаимному сочленению тензопреобразователя и электронного блока:
- со встроенным тензопреобразователем;
- с вынесенным тензопреобразователем.
Преобразователи со встроенным тензопреобразователем выполнены в цилиндрическом корпусе.
Для подачи измеряемого давления в нижней части преобразователей расположен резьбовой штуцер с шестигранным уступом «под ключ». В центре штуцера имеется отверстие для подвода измеряемой среды к мембране тензопреобразователя.
В преобразователях с вынесенным тензопреобразователем тен-зопреобразователь представляет собой отдельный узел, соединенный с корпусом электронного блока преобразователя через электрический кабель и электрический соединитель.
В преобразователях с открытой мембраной для ее защиты от механических повреждений предусмотрен колпачок.
В верхней части преобразователя для подсоединения внешних электрических цепей имеется электрический соединитель, закрепленный на корпусе преобразователя. Существует несколько видов электрических соединителей: кабельный ввод встроенного отрезка (далее — кабельный ввод), сальниковый ввод, соединитель серии GDM (по DIN 43650).
В преобразователях входное давление преобразуется в выходные сигналы тока или напряжения. Входное давление воздействует на мембрану тензопреобразователя, что приводит к изменению сопротивлений плеч тензомоста попарно в противоположных направлениях и к появлению на выходе тензомоста сигнала разбаланса, который преобразуется в токовый выходной сигнал преобразователя.
Электропневматический клапан автостопа усл. № 150И (ЭПК)
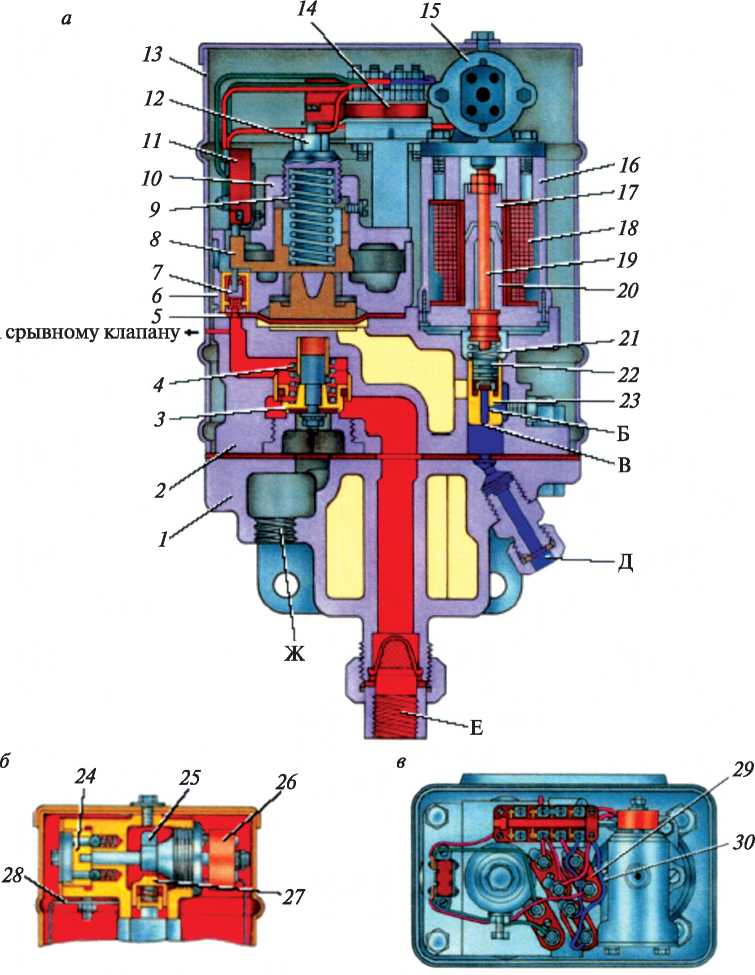
Рис. 8.17. Электропневматический клапан автостопа усл. № 150И: а — устройство клапана; б — замок; в — электрическая часть клапана; 1 — кронштейн; 2 — корпус; 3 — срывной клапан; 4, 9, 21 — пружины; 5 — диафрагма; 6 — средняя часть; 7 — клапан; 8 — рычаг; 10 — крышка; 11 — концевой выключатель; 12 — винт; 13 — кожух; 14 — выключатель; 15 — замок; 16— электромагнитный вентиль; 17 — якорь; 18 — катушка; 19 — шток; 20 — сердечник; 22 — плунжер; 23 — втулка с седлом клапана; 24 — механизм замка; 25 — эксцентриковый валик; 26 — эксцентрик; 27 — буфер; 28 — скоба; 29 — клемма; 30 — провод; А — поддиафрагменная камера; Б, В — калиброванные отверстия; Г — камера выдержки времени; Д — канал подвода воздуха из питающей магистрали; Е — канал подвода воздуха из тормозной магистрали; Ж — атмосферный клапан
ЭПК автостопа усл. № 150И (рис. 8.17) состоит из следующих основных узлов: кронштейна 1, корпуса 2, средней части 6, замка 15 и электромагнитного вентиля 16. В этих узлах находятся:
- в кронштейне 1 — камера Г выдержки времени объемом 1,0 л и выводы для соединения клапана через калиброванные отверстия Б и В с питающей магистралью (вывод Д) и с тормозной магистралью (вывод Е);
- в корпусе 2 — срывной клапан (поршень) 3 экстренной разрядки магистрали с резиновой манжетой и пружиной 4, плунжер 22, свисток и камера А;
- в средней части 6 — диафрагма 5, клапан 7, рычаг 8 и пружина 9, поджатая винтом 12;
- в корпусе электромагнитного вентиля 16 — катушка 18, якорь 17, шток 19 с пружиной 21 и сердечник 26;
- в корпусе замка 15 — эксцентриковый валик 25 и механизм 24 (замок) приведения эксцентрика в действие. С осью валика 25 соединен пластмассовый эксцентрик 26.
Полость над плунжером 22 сообщена с атмосферой отверстием диаметром 4,0 мм. На крышке 10 укреплено электрическое устройство ЭПК, состоящее из концевого выключателя 11 типа ВПК-2010, электромагнитного вентиля 16, контактного выключателя 14 типа ВПК-4020 и четырех двухштыревых клемм 29. Провода 30 выведены из-под кожуха 13 наружу в резиновом шланге.
Для включения ЭПК необходимо в корпус замка 15 вставить ключ и повернуть его по часовой стрелке. При этом эксцентриковый валик 25 через буфер 27 переместит вниз шток 19 с плунжером 22 и прижмет клапан к седлу втулки 23.
Зарядка (рис. 8.18). Воздух из питательной магистрали ПМ через кран Кр2 и калиброванное отверстие В диаметром 1,0 мм, а затем через отверстие Б диаметром 1,0 мм поступает в камеру выдержки времени Г и камеру А под диафрагмой. Зарядка камеры Г от давления 1,5 до 8,0 кгс/см происходит не более чем за 10 с.
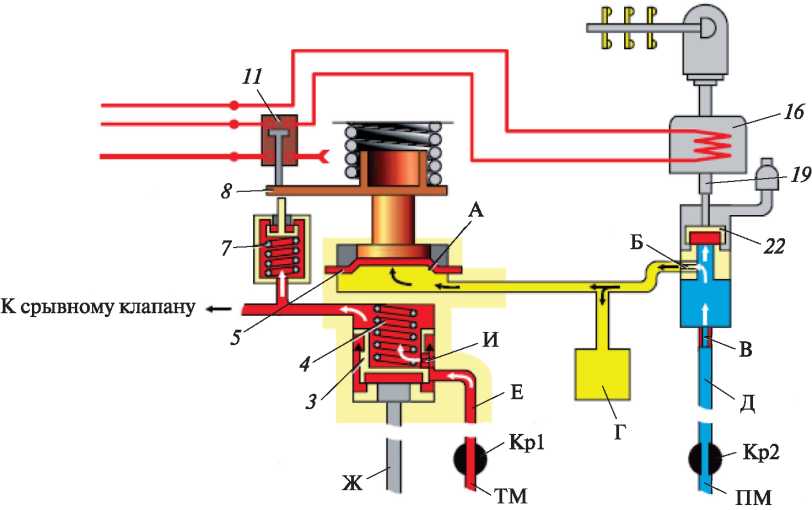
Рис. 8.18. Действие ЭПК при зарядке
Диафрагма 5 занимает верхнее положение, рычаг 8 перемещает стержень концевого выключателя 11 и замыкает верхнюю пару контактов. После этого электрическая цепь электромагнитного вентиля 16 готова к действию.
Сжатый воздух из тормозной магистрали ТМ через кран Кр1 и калиброванное отверстие И диаметром 0,8 мм в поршне срывного клапана 3 проходит под клапан 7 и прижимает его к седлу. Под действием пружины 4 клапан 3 опускается и разобщает атмосферный канал Ж и тормозную магистраль ТМ. При воздействии на рукоятку бдительности в катушку вентиля 16 подается ток напряжением 45—55 В. При этом якорь притягивается к сердечнику электромагнита и шток 19 прижимает плунжер 22 к седлу.
Торможение (рис. 8.19). При смене сигнала на локомотивном светофоре на более запрещающий обмотка вентиля 16 обесточивается. Давление воздуха из ПМ перемещает плунжер 22, и якорь со штоком 19 поднимается вверх.
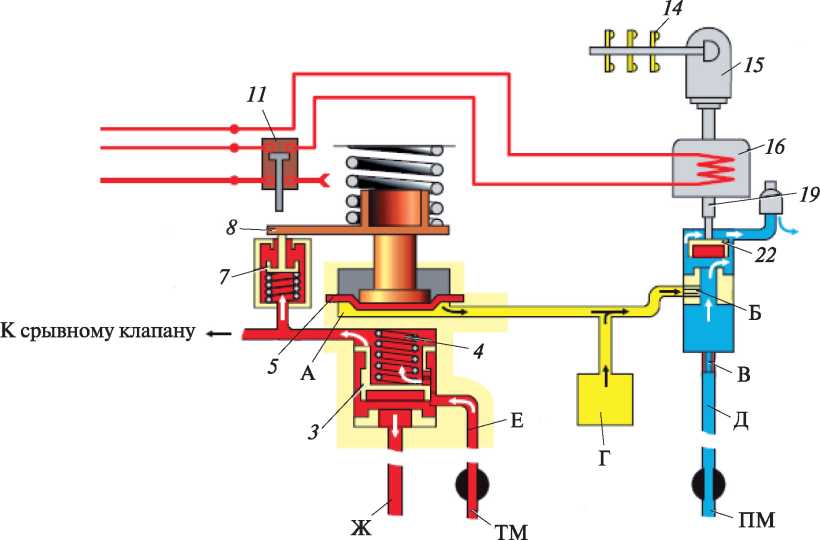
Рис. 8.19. Действие ЭПК при торможении
Сжатый воздух из камеры выдержки времени Г и из камеры А через калиброванное отверстие Б поступает в свисток и уходит в атмосферу. Одновременно воздух будет поступать в свисток из питательной магистрали через отверстие В.
Проходные сечения отверстий Б и В подобраны так, что давление под плунжером 22 поддерживается в пределах (2,0—2,5) кгс/см2 и снижение давления в камере Г не оказывает влияние на действие свистка. Если по истечении 6—7 с после начала подачи звукового сигнала свистком будет нажата рукоятка бдительности, на катушку вентиля 16 снова будет подано электропитание и электропневматический клапан автостопа вернется в исходное положение.
Давление воздуха в камере выдержки времени снижается с 8,0 до 1,5 кгс/см2 за 7—8 с. Если в течение этого времени рукоятка бдительности не будет нажата, давление воздуха в камерах Г и А снизится до 1,5 кгс/см2, под действием сжатой пружины диафрагма 5 прогнется вниз на 6,0—7,5 мм и рычаг 8 откроет клапан 7, сообщив тем самым камеру над срывным клапаном 3 с атмосферой.
Давлением воздуха из тормозной магистрали поршень срывного клапана будет отжат от седла, вследствие чего произойдет экстренная разрядка тормозной магистрали ТМ через широкий атмосферный канал Ж. Стержень концевого выключателя 11, следуя за рычагом 8, опустится вниз и разъединит электрическую цепь ЭПК. При давлении в тормозной магистрали около 1,5 кгс/см2 срывной клапан 3 под действием пружины 4 сядет на седло.
Прекратить начавшееся торможение поезда, вызванное срабатыванием автостопа, путем нажатия на рукоятку бдительности невозможно (электрическая цепь ЭПК разъединена контактами концевого выключателя 11).
Чтобы включить автостоп и отпустить тормоза поезда, необходимо вставить ключ и повернуть его в крайнее правое положение.
Наличие на ЭПК выключателя 14 позволяет регистрировать на ленте скоростемера или в энергонезависимой памяти КЛУБ-У включенное положение автостопа, периодические нажатия рукоятки бдительности и срабатывание ЭПК (экстренное торможение).
Блок контроля несанкционированного отключения (КОН) ЭПК ключом
Блок контроля несанкционированного отключения ЭПК ключом (КОН) предназначен для предотвращения несанкционированного отключения ЭПК ключом на локомотивах и МВПС, оборудованных как АЛСН с дополнительными устройствами безопасности, так и системой КЛУБ-У.
В варианте функционального исполнения без платы электронного блока (для КЛУБ-У) блок КОН имеет в составе только электропневматический вентиль ЭПВ-120 включающего типа, который должен пневматически подсоединяться к полости над срывным клапаном ЭПК. Электрический сигнал управления ЭПВ должен подаваться от системы КЛУБ-У, и работа блока КОН производится в соответствии с алгоритмом, формируемым системой КЛУБ-У.
Устройство и действие
Конструктивно блок КОН (рис. 8.20) выполнен в металлическом корпусе, в котором размещены электропневматический вентиль ЭПВ-120 включающего типа и плата электронного блока.
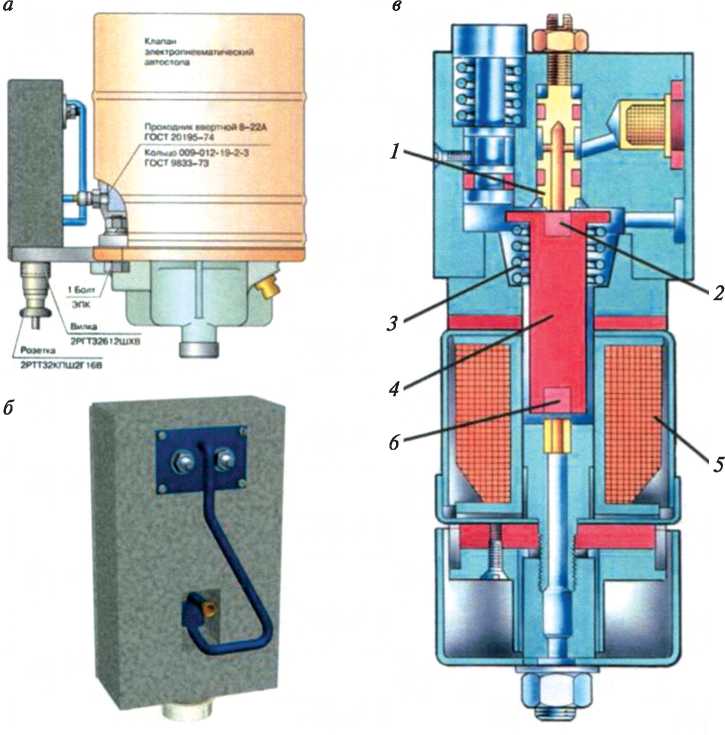
Рис. 8.20. Блок КОН на клапане ЭПК: а — пример установки блока КОН на ЭПК; б — блок КОН; в — клапан электропневматический ЭПВ-120; 1 — пневмораспределитель; 2, 6 — седло клапана; 3 — пружина; 4 — клапан; 5— катушка
При выключении машинистом ЭПК ключом при скорости выше минимально контролируемой (10 (2) км/ч) и отсутствии в тормозных цилиндрах давления более чем (0,7 ± 0,1) кг/см2 блок КОН через 10—14 с подает питание на ЭПВ, который выпускает воздух из полости над срывным клапаном ЭПК и включает экстренное торможение без выдержки времени. Таким образом обеспечивается невозможность полного выключения устройств АЛСН или КЛУБ-У в процессе движения простым выключением ЭПК ключом.
В случае если внезапно загорелся огонь «К» или «КЖ» на локомотивном светофоре или блоке индикации КЛУБ-У, а скорость движения выше контролируемой при данных огнях в соответствии с действующими инструкциями, машинист должен на 5—7 с выключить ЭПК ключом с обязательным включением ЭПК и после этого принять меры для снижения скорости ниже контролируемой. Если машинист выполняет требования инструкции, то блок КОН не вмешивается в его работу.
Если машинист не принял меры к снижению скорости (давление в тормозных цилиндрах отсутствует или менее (0,7 ± 0,1) кгс/см2) и выключил устройства АЛСН ключом более чем на 10 с, то блок КОН подает питание на ЭПВ и включает экстренное торможение без выдержки времени.
Включение и выключение устройств АЛСН и КЛУБ-У при установленном блоке КОН возможно только на стоянке, в противном случае через 10—14 с произойдет срыв ЭПК без предупредительного свистка.