Контроль вращения осей колесных пар в режимах выбега и торможения, являющийся одним из важнейших факторов в обеспечении безопасности, в конструктивном исполнении на электропоезде «Сапсан» реализован посредством размещения на каждой оси датчиков контроля вращения фирмы «Knorr Bremze». Принцип работы датчика контроля вращения основан на эффекте Холла, который был открыт в 1879 г. американским ученым Эдвином Гербертом Холлом. Сущность эффекта Хола (рис. 8.84) состоит в следующем. Если через проводящую пластинку пропускать ток, а перпендикулярно пластинке направить магнитное поле, то в направлении, поперечном току (и направлению магнитного поля), на пластинке появится напряжение:
UH=(RH H I sin ω)/d,
где RH — коэффициент Холла, зависящий от материала проводника; Н — напряженность магнитного поля; I — ток в проводнике; ω — угол между направлением тока и вектором индукции магнитного поля (если ω = 90°, sin ω = 1); d — толщина материала.
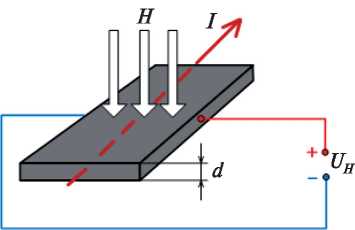
Рис. 8.84. Физическая сущность эффекта Холла
Благодаря тому что выходной эффект определяется произведением двух величин (Н и I), датчики Холла имеют весьма широкое применение, в том числе в датчиках и сенсорных элементах.
В магнитном поле на движущиеся электроны воздействует сила Н. Вектор силы Н перпендикулярен направлению как магнитной, так и электрической составляющих магнитного поля. Если внести в магнитное поле с индукцией полупроводниковую пластинку, через которую протекает электрический ток I, то на боковых сторонах перпендикулярно направлению тока возникает разность потенциалов. Напряжение Холла (ЭДС Холла) пропорционально току и магнитной индукции.
Конструктивное исполнение датчика контроля вращения представлено на рис. 8.85.
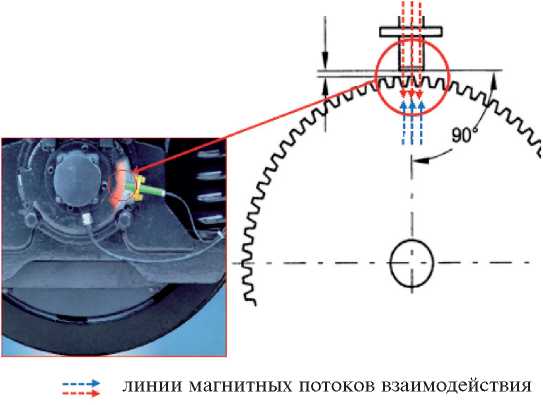
Рис. 8.85. Принцип действия датчика контроля вращения
Между зубчатым венцом стальной шайбы, крепящейся к торцевой части оси колесной пары, и магнитом имеется зазор. В зазоре датчика находится стальной экран. Когда в зазоре нет экрана, на пластинку полупроводника датчика действует магнитное поле, и с нее снимается разность потенциалов. Если же в зазоре находится экран, то магнитные силовые линии замыкаются через него и на пластинку не действуют, в этом случае разность потенциалов на пластинке датчика контроля вращения не возникает. Интегральная микросхема блоков систем управления электропоезда «Сапсан» преобразует разность потенциалов, создающуюся на пластинке датчика вращения, в отрицательные импульсы напряжения определенной величины на его выходе. Когда экран находится в зазоре датчика, на его выходе имеется напряжение, если же в зазоре датчика экрана нет, то напряжение на выходе датчика близко к нулю. Соответственно, при падении уровня сигналов с датчика контроля вращения системы управления поезда автоматически формируют и реализуют управляющие воздействия, исключающие движение поезда в режимах выбега и торможения. Система датчиков контроля вращения питается от линии аккумуляторных батарей напряжением от 12 до 16 В, датчик имеет защиту от включения с неправильной полярностью, защиту от короткого замыкания и высокочастотного воздействия. Расположение датчиков вращения на осях колесных пар электропоезда «Сапсан» было приведено на рис. 8.76 и 8.77.
Согласно конструкторскому решению для обеспечения эталонного сигнала контроля движения поезда как вперед, так и назад имеются два датчика (с обеих сторон третьей оси вагонов DR T, работающих в зависимости от активной кабины электропоезда «Сапсан»), которые формируют сигнал для файлового блока ЦРДС, находящегося в подсистеме ЦБУ. Вышеуказанные оси не задействованы в режимах служебного торможения. Их торможение активируется только в режиме экстренного торможения, когда необходимо реализовать максимальную тормозную силу, влияющую на тормозной путь поезда.
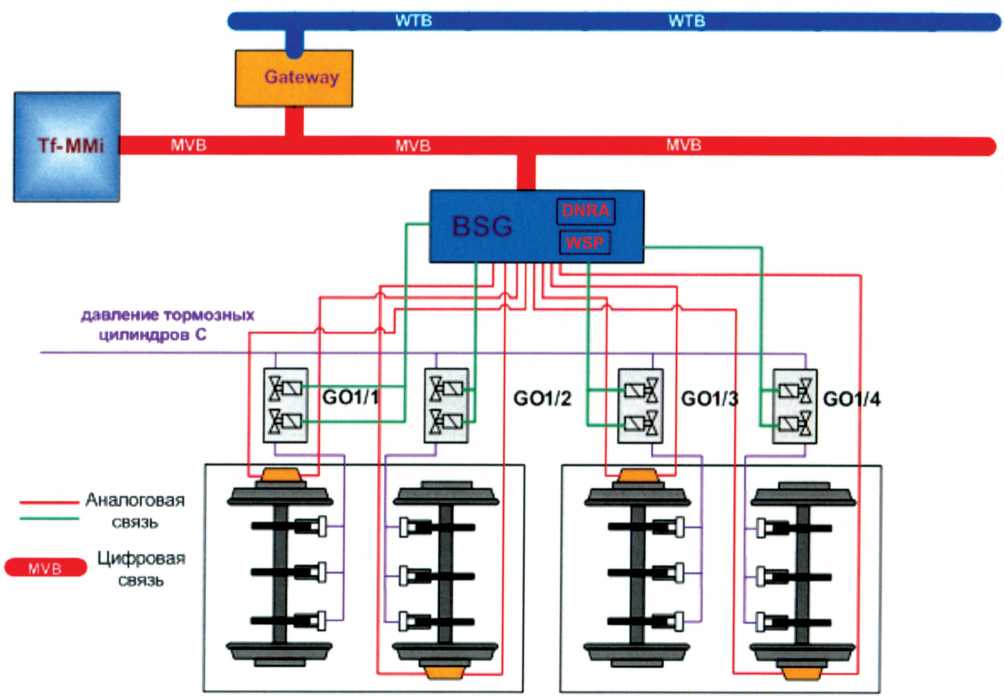
Рис. 8.86. Архитектурная схема системы контроля вращения осей и противоюзной защиты прицепного вагона ЭВС «Сапсан»: Tf-MMi — интерфейс «Человек—машина»; BSG — блок управления тормозной системой вагона; DNRA — блок обработки сигналов датчиков вращения DR T, TR T, BAT R); GO1 — блок противоюзного клапана; Gateway — шлюз для связи многофункциональной и проводной шин; WSP — противоюзная система
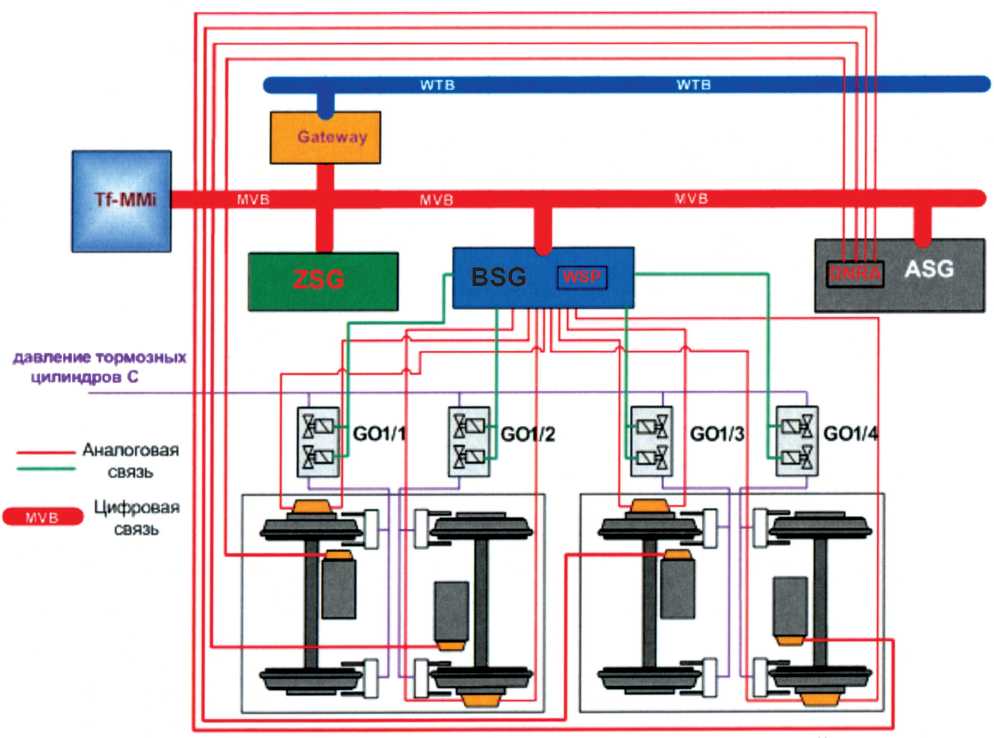
Рис. 8.87. Архитектурная схема системы контроля вращения осей и противоюзной защиты моторного вагона ЭВС «Сапсан»: Tf-MMi — интерфейс «Человек—машина»; BSG — блок управления тормозной системой вагона; ASG — блок управления приводом (SR B, SR T); DNRA — функциональный блок контроля вращения колесных пар; WSP — противоюзная система; Gateway — шлюз для связи многофункциональной и проводной шин; ZSG — ЦБУ
На моторных и прицепных вагонах электропоезда реализована отличная архитектурная схема системы контроля вращения (см. рис. 8.86 и 8.87). Система контроля вращения осуществляет две функции: контроль вращения колесных пар в процессе движения электропоезда и предотвращение режима юза в процессе торможения поезда как пневматическими, так и электродинамическими тормозами, а также при торможении в смешанном режиме, когда используется комбинированное торможение моторных и прицепных вагонов. Сбор и обработку параметров сигналов от датчиков контроля вращения на прицепных вагонах выполняют блок управления тормозами BSG и функциональный блок контроля вращения колесных пар DNRA. На моторных вагонах систему контроля вращения представляют блоки управления торможением BSG и блоки управления приводом ASG. Данные модули взаимодействуют при регулировании тормозной силы, возникающей в процессе электродинамического торможения, посредством асинхронных тяговых электродвигателей и их питающих силовых электронных преобразователей, а также осуществляют контрольные функции отслеживания вращения колесных пар и элементов привода колесно-моторных блоков тележек электропоезда.
В отличие от систем датчиков контроля нагрева и датчиков поперечного ускорения система контроля вращения не имеет ступеней контроля. Если какая-либо колесная пара электропоезда не вращается при фактической скорости движения электропоезда более 40 км/ч, посредством передачи формируемого сигнала от датчиков контроля вращения осей колесных пар в ЦБУ активируются контрольные функции контура петли контроля тележки, которая в свою очередь формирует управляющее воздействие на блок БУТ-мастер, активирующий автоматическое принудительное торможение в режиме «ПСТ». При отказе функции контроля вращения на каком-либо из вагонов электропоезда при фактической скорости более 200 км/ч с момента формирования диагностического сообщения у машиниста имеется 5 мин для снижения фактической скорости, в противном случае активируется автоматическое принудительное торможение по вышеописанному алгоритму. В случае потери связи или ее сбоя в структуре блоков управления торможением вагонов с блоком БУТ-мастер система выполняет необходимые регулировки тормозного усилия, предотвращающие возникновение режима юза колесных пар в процессе торможения, в автономном режиме. Согласно концепции противоюзной системы электропоезда «Сапсан» процесс становится подконтрольным при достижении фактической скорости электропоезда более 20 км/ч, то же условие распространяется и на режим буксирования поезда вспомогательным локомотивом при условии активации контура петли «Буксировка» на третичной панели кабины управления, с которой произведено сцепное соединение.