Для установления эксплуатационных возможностей электропоездов, расчета времени хода и тормозного пути, определения нагрузки на питающую сеть, а также для решения ряда других задач принято использовать таблицы или графики, называемые тяговыми и тормозными характеристиками. Тяговой характеристикой называется зависимость силы тяги на ободе колеса, создаваемой всеми двигателями электропоезда, от скорости движения.
Тяговая характеристика определяется как свойствами самих тяговых двигателей, так и особенностями конструкции подвижного состава. Кроме того, на тяговую характеристику всегда накладывается ряд ограничений, работа за пределами которых либо невозможна, либо может привести к повреждению подвижного состава или к аварии. Для высокоскоростного подвижного состава с асинхронными тяговыми двигателями справедливы следующие ограничения:
- по сцеплению (в зоне низких скоростей);
- по максимальной мощности тяговых двигателей;
- по максимальной скорости;
- по максимальной величине скольжения ротора.
Система автоматического управления электропоездом настроена таким образом, чтобы реализуемая сила тяги при любой скорости не выходила за пределы указанных ограничений, чем обеспечивается эксплуатационная надежность.
Тяговые характеристики для положения задатчика тяги 100 %, 75 %, 50 % и 25 % приведены на рис. 2.1.
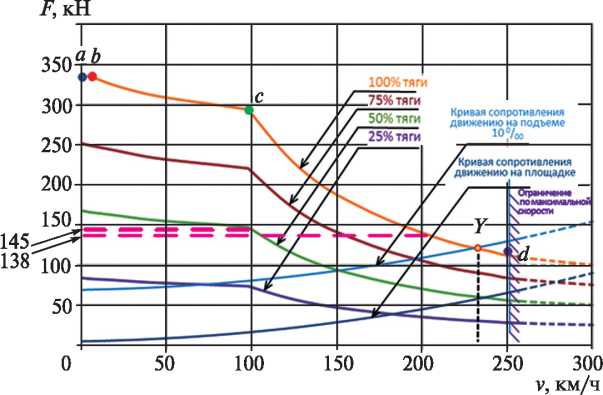
Рис. 2.1. Тяговые характеристики скоростных электропоездов ЭВС1(2)
Тяговая характеристика имеет несколько характерных участков, форма которых определяется физическими характеристиками тягового привода и поезда, а также алгоритмом управления системы автоматического регулирования:
- на отрезке а—b при движении с малой скоростью поддерживается постоянная сила тяги;
- на отрезке b—с (до скорости 98 км/ч) осуществляется плавное регулирование со снижением силы тяги. Такая форма кривой определяется физическим процессом — реализацией силы тяги по сцеплению. Для того чтобы в процессе пуска не возникло боксо-вание колесных пар, сила тяги поддерживается на уровне, меньшем чем ограничение по сцеплению, с необходимым запасом. Так как кривая ограничения по сцеплению имеет тенденцию к снижению по мере увеличения скорости, система автоматического управления снижает и силу тяги с целью поддержания этого запаса. На всем участке а—Ь—с на зажимах трехфазных асинхронных тяговых электродвигателей (АТЭД) увеличиваются напряжение и частота. Можно сказать, что в этом режиме осуществляется частотное регулирование скорости тяговых двигателей, хотя система управления работает по иному алгоритму — принципу так называемого векторного управления. Напряжение на зажимах двигателей повышается за счет увеличения коэффициента заполнения ШИМ (широтно-импульсной модуляции), а магнитный поток остается примерно постоянным;
- на отрезке c— d при скорости 98 км/ч мощность и напряжение тягового двигателя достигают номинального значения. Дальнейшее регулирование напряжения становится невозможным, и тяговый инвертор (PWR) обеспечивает примерно постоянное выходное напряжение. Для дальнейшего увеличения скорости на отрезке c— d производится увеличение частоты при постоянном напряжении, т.е. режим «постоянства мощности». Так как Р = Fkv, при постоянной мощности сила тяги по мере увеличения скорости снижается обратно пропорционально (отрезок c—d).
Так как величина потока асинхронной машины при постоянном напряжении обратно пропорциональна частоте, на скоростях 98—250 км/ч АТЭД работает с ослабленным полем. Скорость 250 км/ч является в настоящее время предельной для электропоездов ЭВС1(2), хотя тяговые свойства позволяют увеличивать скорость и дальше.
Чтобы оценить, какую скорость может развить электропоезд в тех или иных условиях, на тяговые характеристики наносят кривые сопротивления движению: для движения на площадке и для движения по подъему крутизной 10 %о. Так как сила тяги с увеличением скорости падает, а сила сопротивления движению растет (прежде всего, за счет аэродинамической составляющей), в точке, где эти кривые пересекутся, сила тяги будет равна силе сопротивления движению. Это значит, что поезд перестал разгоняться и движется равномерно. Если к основному сопротивлению движению, определяемому силами трения, добавится сопротивление от подъема, результирующая кривая пойдет выше. Из рис. 2.1 видно, что на площадке (участке пути без подъема) точка пересечения кривых 100 % мощности и сопротивления движению соответствует скорости более 300 км/ч. Это говорит о принципиальной возможности достижения поездом такой скорости при снятии ограничений. Если же поезд движется на подъеме крутизной 10 %о, то точка пересечения соответствует скорости 235 км/ч, выше которой на таком подъеме поезд не разгонится.
Тяговые характеристики поезда используются при тяговых расчетах. Цель тягового расчета — построить кривую (траекторию) движения поезда, представляющую собой зависимости v (5) и t (s), где v — скорость, t — время, s — путь. По ним можно определить время хода и в дальнейшем построить график движения поездов. Также, используя приведенные ниже токовые характеристики, можно сделать предварительный расчет расхода электроэнергии на тягу поезда и определить нагрузку на тяговую сеть.
Токовой характеристикой называется зависимость величины тока (или силы тока), потребляемой поездом из контактной сети, от скорости движения. Токовой характеристикой определяется нагрузка на тяговую сеть, потребление энергии электропоездом, а также условия в зоне контакта полоза токоприемника с контактным проводом. Знать токовую характеристику необходимо, так как величина потребления тока из контактной сети не должна превышать возможностей системы электроснабжения, а значительное выделение тепла в зоне соединения «контактный провод—токоприемник» может привести в ряде описанных ниже случаев к повреждению полоза и пережогу контактного провода.
Токовая характеристика электропоезда «Сапсан», как и другого электроподвижно-го состава с асинхронными тяговыми двигателями, значительно отличается от подобной зависимости традиционного ЭПС. Во-первых, она бесступенчатая, так как позиции контроллера — условные, а переход между ними осуществляется плавно. Во-вторых, по сравнению с ЭПС постоянного тока с резисторно-контакторной системой (РКС) и перегруппировками двигателя ток в момент начала движения очень мал и определяется потерями энергии в тяговом приводе, а затем постепенно нарастает.
Токовая характеристика в режиме питания от контактной сети постоянного тока для режима 100 % тяги приведена на рис. 2.2.
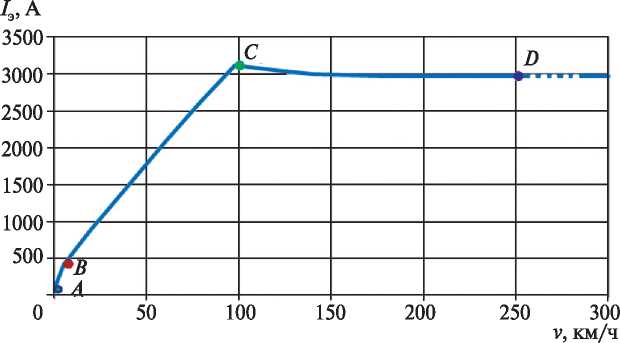
Рис. 2.2. Токовая характеристика поезда «Сапсан» при питании от постоянного тока напряжением 3 кВ
При начале движения (точка А) величина тока, потребляемого из контактной сети, невелика и составляет всего 67 А. Это значительно меньше, чем у традиционного ЭПС постоянного тока. Так, при пуске электропоезда ЭР2 на позиции «М» ток секции почти мгновенно возрастает до значения 140 А, а если контроллер установить в положение «1», то его величина может достичь 220 А. (Ток всего поезда — до 1100 А!) Причина этого — в совершенной системе управления поезда «Сапсан». Если в поезде ЭР2 избыточная энергия тратится на нагрев пусковых сопротивлений, то в системе с асинхронным электроприводом это явление отсутствует: ток при скорости «0» определяется потерями в двигателе и преобразователе, а также потреблением энергии на собственные нужды. Такое малое значение тока, безусловно, может выдержать даже один токоприемник, тогда как на традиционных электропоездах постоянного тока ЭР2, ЭР2Т ЭТ и ЭД каждую секцию необходимо питать от собственного токоприемника из-за опасности пережога контактного провода.
Далее ток начинает расти, вначале пропорционально скорости, затем с небольшим уменьшением, определяемым тяговой характеристикой. К точке В (скорость 5 км/ч) он равен 412 А, а к точке С, соответствующей скорости 98 км/ч, его величина составляет 3123 А, т.е. достигает максимального уровня. Однако токоприемники могут выдержать этот ток, так как при большой скорости полоз хорошо охлаждается набегающим потоком, а локальный перегрев контактного провода невозможен. Мощность в этот момент несколько выше паспортной и составляет около 9000 кВт, так как работает не только тяговый привод, но и вспомогательные потребители; потери в преобразователях тоже растут.
Следует отметить, что в этот момент система электроснабжения работает наиболее напряженно, особенно если на одной фидерной зоне оказываются два электропоезда, например при скрещении. Из-за этого возможно срабатывание защиты со снятием напряжения. После точки С рост тока прекращается и происходит даже некоторое его снижение из-за изменения режима работы тяговых инверторов и особенностей алгоритма управления. В отличие от ЭПС постоянного тока в точке D, соответствующей максимальной эксплуатационной скорости, «Сапсан» развивает практически номинальную мощность за счет плавного регулирования магнитного потока и скольжения асинхронных тяговых электродвигателей.
Токовая характеристика в режиме питания от переменного тока 25 кВ по форме аналогична кривой для питания от постоянного тока, так как четырехквадрантный регулятор 4QS обеспечивает потребление из сети только активной мощности. Разница заключается в величине тока: она меньше в 8,4 раза (рис. 2.3).
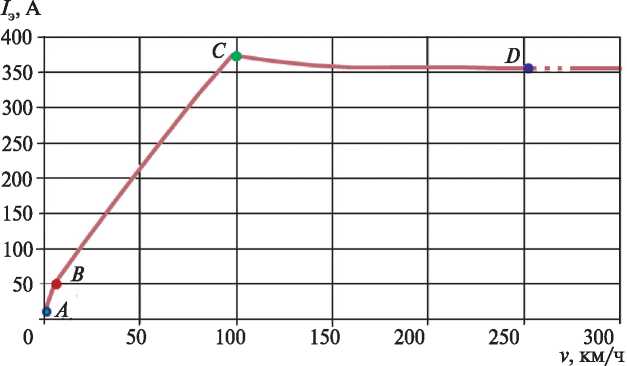
Рис. 2.3. Токовая характеристика поезда «Сапсан» при питании от переменного тока напряжением 25 кВ
Тормозной характеристикой электропоезда называется зависимость тормозной силы на ободе колеса от скорости движения B(v). На электропоездах ЭВС1(2) используются различные виды торможения, и для каждого из них строится отдельная характеристика, но может быть простроена и общая с учетом замещения одних тормозов другими либо их совместного использования. Тормозные характеристики электропоезда «Сапсан» приведены на рис. 2.4 для режимов реостатного и рекуперативного торможения, положение задатчика соответствует максимальной тормозной силе.
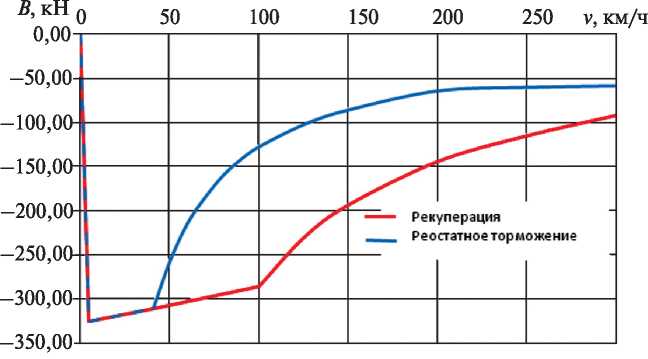
Рис. 2.4. Тормозные характеристики
Тормозные характеристики в режиме электрического торможения подчиняются тем же законам, что и тяговые. В зоне высоких скоростей поддерживается постоянство мощности, а в зоне низких — постоянство тормозной силы с некоторым ее повышением по мере снижения скорости. Асинхронный двигатель может осуществлять практически остановочное торможение. В зоне очень малых скоростей тормозная сила начинает падать и при скорости менее 5 км/ч уменьшается до 0.
В режиме реостатного торможения максимальная мощность ограничивается не конструкцией тяговых электродвигателей, а мощностью тормозных резисторов, в результате чего тормозная сила почти в два раза меньше, чем при рекуперации.
Электропоезд «Сапсан» может работать в режиме реостатного торможения и без питания от контактной сети (обеспечивается самовозбуждение двигателей), однако диапазон применения электрического тормоза в этом случае меньше.